Final report for GS22-271
Project Information
The objective of the research is to build an energy-efficient autonomous UVC robotics platform for strawberry fungal management. The proposed autonomous robotics platform is expected to enable non-chemical fungal treatment thus sustainable organic strawberry farming. Crucially, our research will address the critical challenges faced by strawberry growers when using UVC for fungal management.
The major challenge of the conventional UVC solution is the low energy efficiency thus poor affordability for strawberry farmers. We will use UVC LED known 95% more energy efficient than the UVC lamp to improve the energy efficiency of the system [1]. We will further optimize the distance between the UVC LED and strawberry plant to increase energy efficiency. Our research proposes a smart LED light intensity computation method to precisely control its individual UVC LED for smart energy-efficient fungal management.
Another major challenge of the conventional UVC fungal treatment solution is UVC safety. UVC poses significant radiation risks to human skin and eyes. Our research proposes a smart grower detection method thus to protect growers from harmful UVC radiation to improve the adoption of the technology.
The autonomous robotics platform is affordable to strawberry growers, especially for socially disadvantaged farmers. The user-friendliness features of the platform enable socially disadvantaged farmers to use the platform for organic strawberry fungal management.
Goal 1: Energy-efficient UVC Platform Development. Novel high throughput close proximity UVC source will be developed for effective fungal management. With the solution, the energy-efficient UVC LED will be used, which is 80 - 95% more energy efficient than the UVC lamp [1]. Furthermore, we will also shorten the distance between the light source and the plant to increase energy efficiency. In contrast to the UVC lamp, the UVC LED source is miniature in size therefore it is able to be used in close proximity to the plant. The intensity of each individual LED will also be controlled based on the severeness of fungal for precise control of fungal diseases.
Goal 2: Smart Fungal Recognition and Analysis Pipeline Development. The importance of big data and artificial intelligence in sustainable agriculture has been well demonstrated [23, 24]. For this, we will build a smart data analysis pipeline for autonomous fungal disease recognition in order to precisely deliver UVC radiation to each individual plant. Specifically, modern deep learning computer vision algorithms will be built for the precise detection of fungal diseases to determine the needed dose for the treatment of fungal diseases. We will also develop a user-friendly GUI application for reporting the results of the UVC fungal treatment.
Goal 3: Affordable and Safe Robotics Platform Development. In particular, we will build an affordable robotics platform for small to medium-sized farms and socially disadvantaged farmers to enable them to better implement sustainable strawberry fungal control. The proposed platform will cost about 5,000$, making it affordable to the majority of strawberry growers. The autonomous robotics platform will make the UVC handling safe for strawberry growers. The UVC chamber will be equipped with infrared cameras to detect the presence of growers. Human detection computer vision algorithms will be developed to detect growers with high accuracy. The UVC light will be automatically turned off upon the detection of the growers close to the UVC chamber to ensure UVC safety.
Cooperators
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
Research
It's a great honor to have support from the Southern SARA for graduate education research. Through the research, we are aimed to achieve the following goals. First, we have been aimed to develop the LED panel for energy efficient strawberry mold control. Second, we has been working closely for the development of source for strawberry mold removal. Second, we want to develop a robotics platform able to perform automated strawberry mold control. The third goal is to detect strawberry mold with the strawberry segmentation method.
Goal 1
For the first objective, we have been working closely on the development of a new UVC source for mold removal. We have designed LED driver from ground up for this research objective. Specifically, the LED driver is shown below. The LED driver is able to support up to 3A current per drive. In total, we have 32 drivers parallel. It means that the LED driver is able to support 96A current for full use. In practice, farmers may choose to use up to five LED drivers at the same time.
The drivers are able to drive UVC LEDs (275nm), infrared LED (940nm), and white LEDs. For this purpose, we have made different LED boards to meet the needs of experimenting different LED lights. The LEDs are controlled through constant current settings which will last about 40,000 hours of usage. As such, they are able to be used by farmers for sustained time to impact their farming.
Goal 2
The second goal of the research is to develop a robotics platform to apply the UVC source for fungal control. For this purpose, we have developed a new robotics platform for strawberry mold removal. The new robotics platform consists of a smart robot and a trailer. The robot is designed to travel on off-road terrains. It is designed to tow over 100 pounds weight. Hence it can be used for the actual farming environment. The robotics platform features two cameras. One is for near-distance imaging and another is for far-distance imaging. Combining the two cameras is able to yield both near and far imaging functions thus for the best outcomes of detection of the strawberry mold shown in Figure 1.

Figure 1: The robotics platform with a payload of about 100 pounds.
The robotics platform features GPS, IMU, and camera. The robotics platform is able to perform imaging of the strawberry field. The GPS is able to help the robotics platform to navigate the field. The IMU sensor will also help to improve the navigation performance based on the robot position, velocity, and acceleration. The robot turning will be obtained through the gyroscope sensors. We have also developed the software used for the research. The software is able to control the robotics platform and responsible for navigation of the robots. The software has been open sourced.
Goal 3
The third goal of the research is to develop the strawberry mold detection method. For this purpose, we have been collecting healthy strawberry images and gray mold strawberry images. We have collected over thousands of images for this purpose. The images have been segmented which have yielded promising results in the detection of the diseased strawberry plants.
We have been working hard in implementing research. All three objectives of the research has achieved significant progresses with fruitful and concrete results. We have also performed systematic evaluation of the research on farms. Specifically, the evaluation of the robotics platform has been conducted on the MTSU research farm. Various tests have been performed for this purpose. Among them, it includes the test on the grassland and the test on the research plot. We have also tested the system in farmer to understand the impacts of the robotics system on the actual farming.
Optical Source Development
The UVC-based optical source has been developed. We performed the initial test of the optical source. We have also tested the UVC lamp. Our objective is to try to publish a paper to contrast the effectiveness of the UVC LED panel and conventional UVC lamp for their effectiveness in strawberry mold removal. Evidently, in contrast to UVC lamps, the UVC LED panel is more capable of being close to the strawberry mold. It is known that the UVC radiation energy is inversely proportional to the square of the distance from the UVC source [1]. As such, it is expected that the UVC LED panel will be more effective than the UVC lamps. The specs of the UVC LED panel are shown in Table 1.
Table 1: The UVC LED panel spec
| LED | Voltage (V) | Current (A) | Power (W) | # Used | Total Power (W) |
| UVC (270- 280nm) | 6.17 | 0.5 | 3.085 | 12 | 37.02 |
The UVC LED panel is designed to be chained together. In reality, it is expected that five or six such panels can be easily chained together to construct 10 by 10 inches or larger panels to perform UVC radiation on strawberries. The single fabricated UVC LED panel (37.2W) is shown in Figure 2.

Figure 2: The fabricated LED panel on a PCB inside the robot.
The LEDs used for the research consist of UVC, infrared, and white color are shown in Figure 3. We have carefully soldered the LEDs to the excellent heatsink as well as using the aluminum metal to further dissipate the heat generated to cool the LEDs to ensure the longevity of the LEDs.
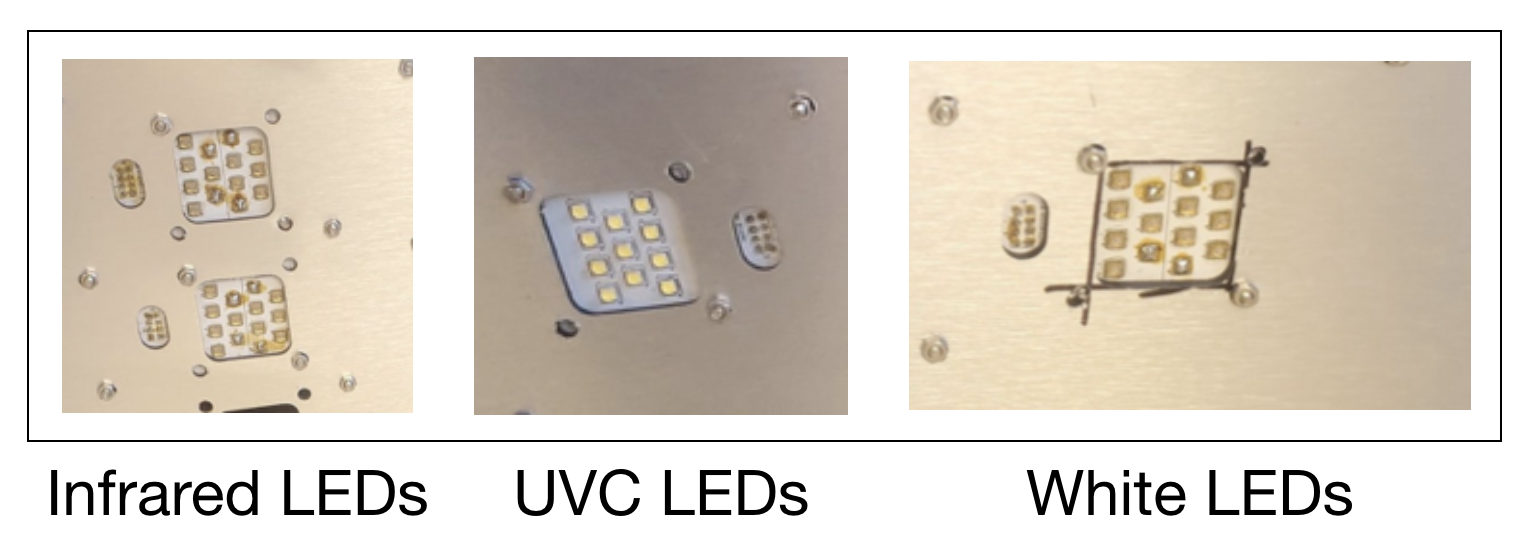
Figure 3: The different colors of LEDs.
Optical Source Evaluation
We have performed systematic evaluation of the impacts of the UVC lights on the health of the strawberries. We have tested the LEDs both indoors (Figure 4) and outdoors (Figure 5) to understand the impacts of the LEDs on the strawberry. For indoor testing, we have tested the combination of different LEDs and their impacts on strawberries. Specifically, we have tested the combination of UVC, white, and infrared LEDs and how they impact the strawberries.
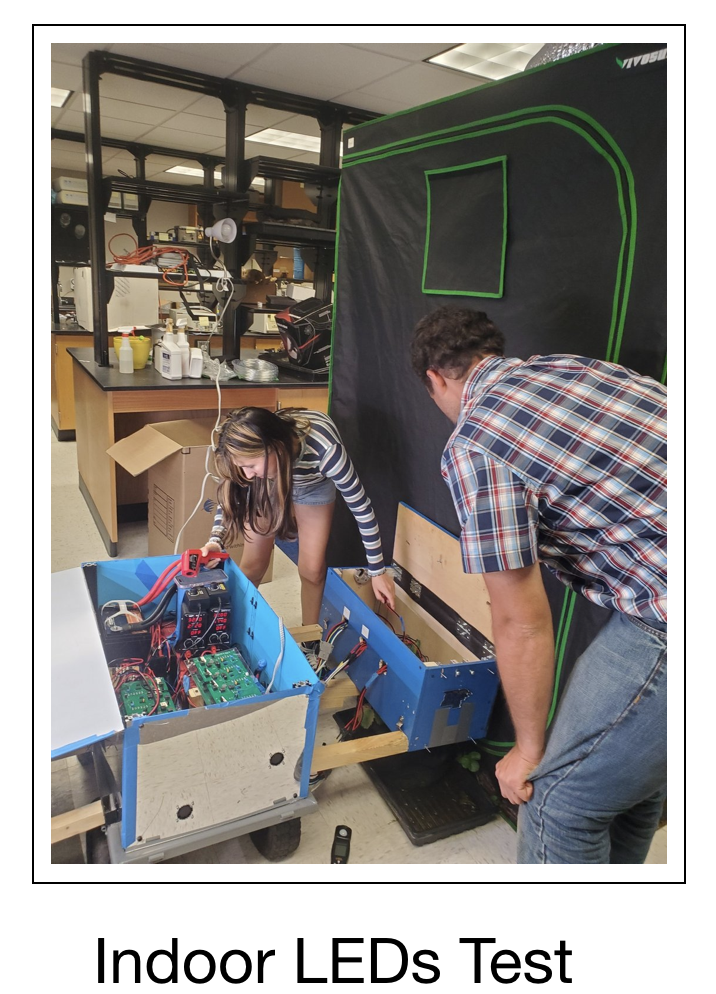
Figure 4: The indoor testing of the LEDs.
For the outdoor testing, we have also tested the combinations of different colors of LEDs and how they impact the strawberries.

Figure 4: The outdoor testing of the LEDs.
Following the measurement of the light intensity and temperature on the surface of the strawberries, we have obtained the relationship between light intensity and the temperature. Through the experiments, it showed that UV light and infrared light have lower light intensity in comparison with white light. The use of the combo of IR, infrared, and white light shows the promises of the balance between light intensity and heat. It therefore suggests that the practical LED-based mold control should consider using the combo of different colors of light.
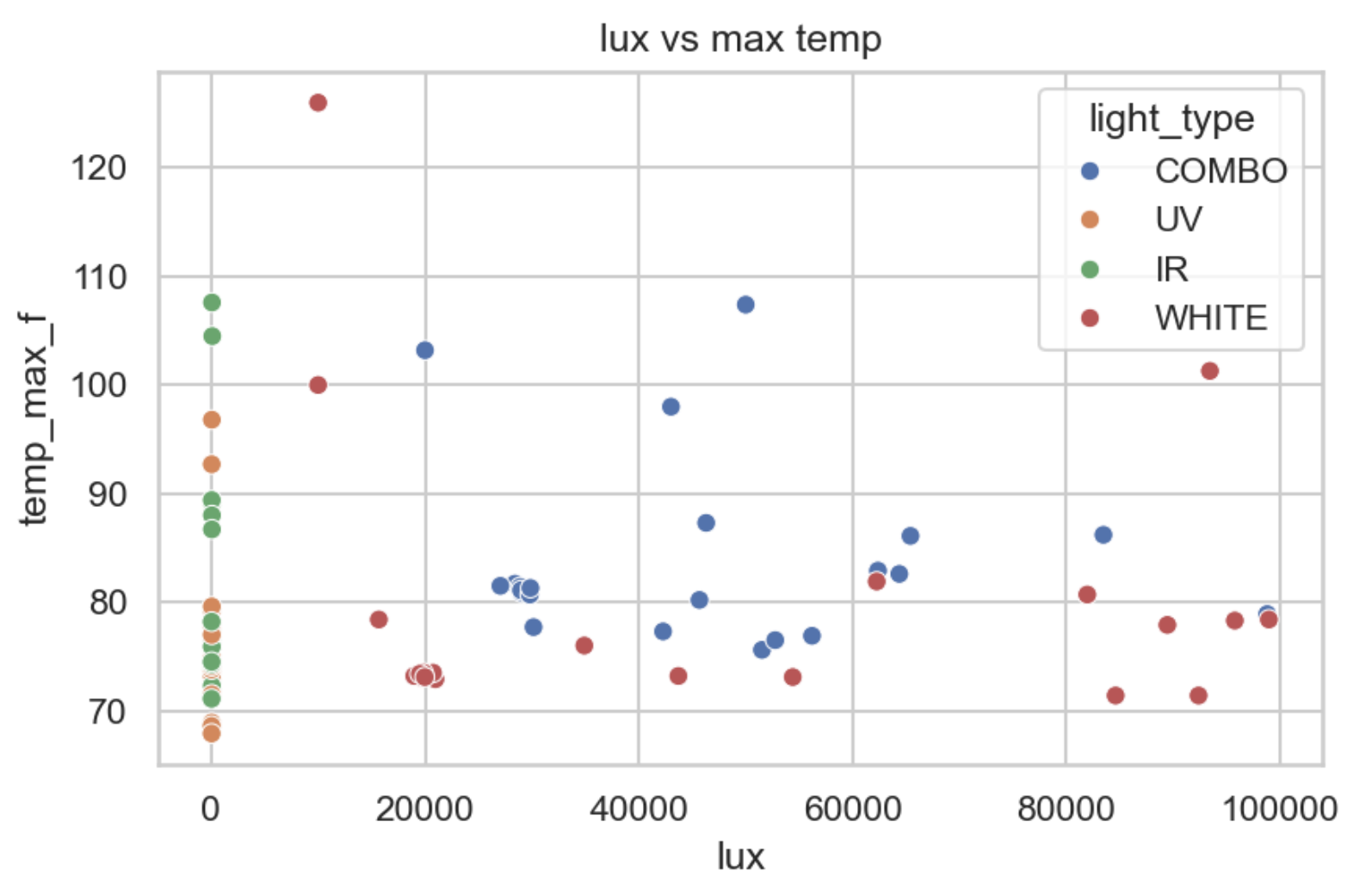
Figure 4: The light intensity and temperature for the combination of different colors of LEDs
We have also performed the study in evaluating the UVC impacts on the strawberries using the Raman spectroscopy. The use of the Raman spectroscopy is able to measure the chemical composition changes of the strawberry plants and soil due to the radiation of the LED lights. Our results showed that the use of Raman is promising to obtain such changes thus able to precisely quantify the changes of the UVC impacts on strawberry and soil.
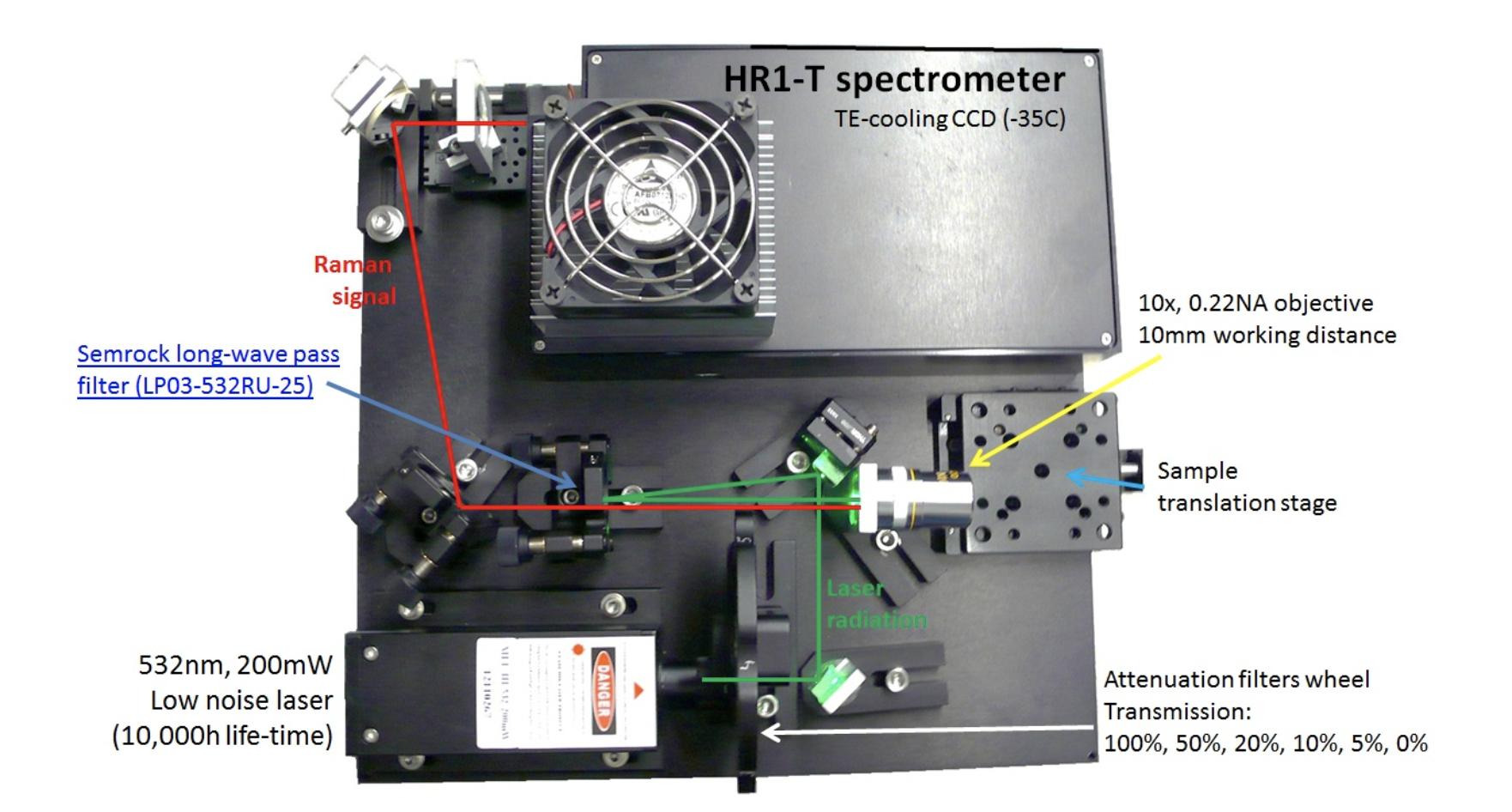
Figure 5: The Raman system used to characterize the impacts of the light on strawberry soil.
The results of the Raman measurement of the strawberry soil before and after UVC exposes are shown in Figure 6. It is evident that the use of the UVC exposes on the strawberry soil has led to the decomposition of the chemical bonds of the strawberry soil. This has thus reinforced that the use of the UVC for the treatment of the strawberry mold will need to be balanced, when the over large dose of the UVC treatment will compromise the health of the strawberry and strawberry soil.
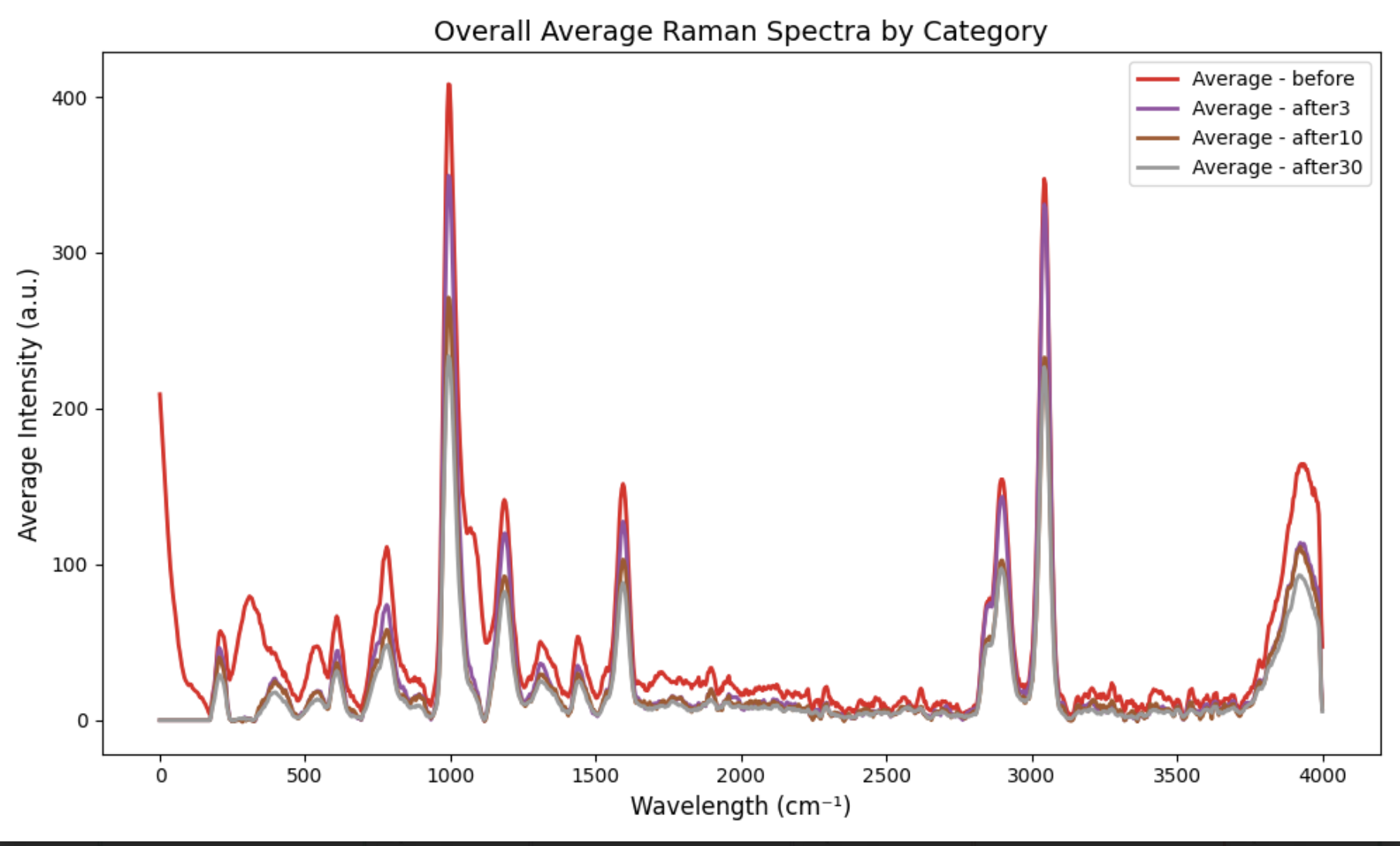
Figure 6: The changes of the Raman system following the exposer of strawberry soil with the UVC light.
Robot Software Development
We have spent significant amount of effort in designing the robot software from ground up. The software is easy to be used by farmers with friendly user interface and easy to use control functions. We have shown the robot operation in the following
Figure 7: The software interface of the robotics navigation
Here is the video for the robotics navigation demonstration.
https://www.youtube.com/watch?v=fRm_X7DfuXw&feature=youtu.be
We have tested the robot both on campus and farms for its navigation to be used in the farming practice shown in Figure 8 and 9. The field robot test has collected the strawberry field images, GPS data, and IMU data such that the data can be used for automatic navigation using the LSTM method.

Figure 8: The test of robotics navigation outdoor of campus.

Figure 9: The test of robotics navigation in strawberry farm.
Strawberry Mold Detection
The critical step of detection of gray mold is the building of the gray mold strawberry database. Until present, there is very little presence of the gray mold database. As such, in order to perform precise gray mold detection, we have performed the collection of sufficient large amount of data from online to make the database. Until present, we have collected multiple diseases and healthy strawberry images total of 3000 images. To produce the dataset, healthy strawberry images were also confirmed before downloading from online. Segment anything method was used for the segmentation of the images to detect the severity of the strawberry mold images.
The critical step in the detection of gray mold is the building of the strawberry fungal database. Until present, there is very little presence of the gray mold database. As such, in order to perform precise gray mold detection, we have started the database construction. The database involves the collection of a sufficiently large amount of data from online to make such database. The total of images collected is 300 gray mold images and 150 healthy images at present. For the construction of the database, the gray mold images are first compared with the standard database and confirmed its gray mold before downloading. After confirmation, the gray mold images will be downloaded. Similarly, healthy strawberry images were also confirmed before downloading them online. Subsequently, the strawberry database will be labeled. Labelme software is used to label the images. In contrast to class-only-based labeling, detailed segmentation-based labeling is used shown in Figure 10. In contrast to the conventional recognition of the strawberry, the new labeling contains sufficient details of each part of the image. For example, we have clearly labeled the leaves, the fruit, the healthy fruit, and the fruit with gray mold. We will use segment anything model pre-trained model [2], therefore it will reduce the required number of images.

 .
. 
Figure 10: The labeled strawberry
The results of the strawberry segmentation are shown in Figure 10 and 1. It is evident that the segmentation method is able to segment the strawberries. The results therefore can be used for the detection of the strawberries. The method is able to segment both the healthy strawberries and the diseased strawberries.

Figure 10: The segnmentation of the healthy strawberries

Figure 11: The segmentation of diseased strawberries
MTSU farm Evaluation
We have also tested the robotics platform on the MTSU research farm. Different scenarios of the tests have been performed. It includes the robot navigation on the grassland as well as the navigation on the research plots. In the following, we showed a few videos for the navigation process. The test includes the robot navigation on the MTSU research farm plots.
The test also includes the robot traveling on the grassland
https://youtube.com/shorts/nmivAYTF8Z0
Farmer's farm Evaluation
We have also performed the system evaluation at farm shown in Figure 12 and 13. The system is welcomed by farmer who believe the system will be useful for their farming practices. Farmers have been actively engaged in the trial and operation of the robotics systems for control of the strawberry mold. Specifically, students involved in the project has been actively participating the research for the development, testing, and farming evaluation of the system to ensure the success of the project.

Figure 12: The farm experiment at Potland county farm Tennneseee.

Figure 13: The farm experiment at Potland county farm Tennneseee.
[1] T. Okuno, J. Ojima, H. Saito, Ultraviolet radiation emitted by co2 arc welding, Annals
of Occupational Hygiene 45 (2001) 597–601.
[2] A. Kirillov, E. Mintun, N. Ravi, H. Mao, C. Rolland, L. Gustafson, T. Xiao, S. Whitehead,
A. C. Berg, W.-Y. Lo, et al., Segment anything, arXiv preprint arXiv:2304.02643
(2023).
Educational & Outreach Activities
We have trained five undergraduate students through the research. They are involved in the research extensively.
Participation summary:
We have involved 8 undergraduate students in this project. They participated in the UVC LED production, robotics platform development, and the strawberry recognition process. They all feel that they have learned a lot through the process. They are engaged in UVC source development, robotics software development, and on farm test. Ibrahim Aljilani got an internship position because he has worked on this research.
Project Outcomes
The project will have a significant impact on sustainability. It will reduce or even eliminate the use of fungicides thus important for sustainability.
The significant advantages of the method are that it does not need a fungicide which is therefore a sustainable approach for strawberry farming.
Our research has built a solid foundation for the future larger-scale research.
In this research. We have gained the following knowledge.
(1) We have built a robotics platform. The robotics platform is able to travel in an off-road farming environment.
(2) We have built UVC LED panel. The UVC LED panel can be chained together to make a large-scale UVC LED panel.
(3) We have developed the strawberry fungal recognition. The model is expected to differentiate different molds, healthy strawberries, and leaves among others.
(4) We have developed robotics sofrware and entire robotics system to automate the process.
(5) We have developed initial UVC exposer evaluation system using Raman Spectrosopy.
The recommendation of the future SARE study is to build a bridge between undergraduate and graduate students to speed up the project to impact farmers.