Final report for LNE22-458R
Project Information
Cranberry (Vaccinium macrocarpon) is a specialty crop of critical importance for the agricultural economy of Massachusetts. For cranberry farming to be a profitable enterprise, growers must balance the demands of crop production with environmental sustainability, uncertainties of a changing climate with regulatory pressures restricting water use, and a surplus of fruit with increasing production costs. To remain viable, Massachusetts cranberry growers are eager for new tools that increase efficiency while reducing environmental impacts of agronomic practices. However, a paucity of information exists on the efficiency and uniformity of fertilizer additions to cranberry farms. Currently, three methods are primarily used to apply fertilizers to cranberry agriculture in Massachusetts: aerial applications by human-piloted helicopters, ground applications by backpack-type broadcast spreaders (hand-crank), and ground applications by ground-rigs. The use of unoccupied aerial vehicles (UAV) offers a new, innovative, potentially advantageous method for Massachusetts cranberry growers to apply granular fertilizer. Here we present a proof-of-concept study investigating the use of UAVs for fertilizer application in commercial cranberry production, and compare it to existing methods. This included using a hexagonal grid approach to measure fertilizer uniformity. Our results showed that fertilizer applied via UAV was truer to the target rate and less spatially variable to hand-crank applications. Growers in southeastern Massachusetts will benefit from this precision agriculture technology and have already begun adopting it in their management practices in the past few years.
We will carry out a proof-of-concept study to demonstrate the use of UAVs for application of fertilizers to cranberry bogs. Specifically, we will (1) determine the optimal altitude, flight speed, and spreader settings for UAV-based fertilizer applications, and (2) evaluate the efficiency and uniformity of fertilizers applied by helicopters, ground rigs, backpack-type broadcast spreaders, and UAVs. Use of UAVs for fertilizer applications has not been tested on cranberry bogs, yet growers are eager for alternatives to current practices that generally lack precision. Use of UAVs represents an opportunity to conserve resources, enhance water quality, and increase agricultural productivity in Massachusetts.
The cranberry industry holds a vital economic and cultural presence in Massachusetts. Cranberry is a cultivated crop that is indigenous to Massachusetts and flourishes in the natural wetlands of the Massachusetts Coastal Plain. The largest cash crop in Massachusetts, approximately 5,000 hectares of cranberry farms produce about 25% of the world’s supply, support over 6,900 jobs, and more than $1 billion in annual activity to the state’s economy. Cranberry farming has a long and culturally rich history in Massachusetts, yet among other issues, inefficient nutrient management practices threaten the sustainability and future viability of cranberry farming in Massachusetts.
To remain profitable, Massachusetts cranberry growers must innovate through precision agriculture to compete with other growing regions, including Wisconsin and Quebec, Canada. Massachusetts growers are eager for research that informs the use of UAVs, which may lower overhead costs, increase fruit yield, and reduce environmental impacts of cranberry production. For example, fertilizer application by helicopters, which is used on roughly 80% of Massachusetts cranberry farms, is limited by the number of helicopters available to growers. This limits growers to applying fertilizer when a helicopter is available, diminishing their control of application timing. Helicopter application on the remaining cranberry acreage in the state may not be feasible due to issues with adjacent land use and/or budgetary constraints. For these farms, manual hand-cranking is often used to apply fertilizer, which is labor-intensive and results in extensive foot traffic on vines. Likewise, exploring the feasibility of UAVs to deliver fertilizer in a more precise and efficient manner could prove to be the next great innovation for commercial cranberry growers, and offering greater flexibility in terms of where and when fertilizer is applied.
Cooperators
Research
2022
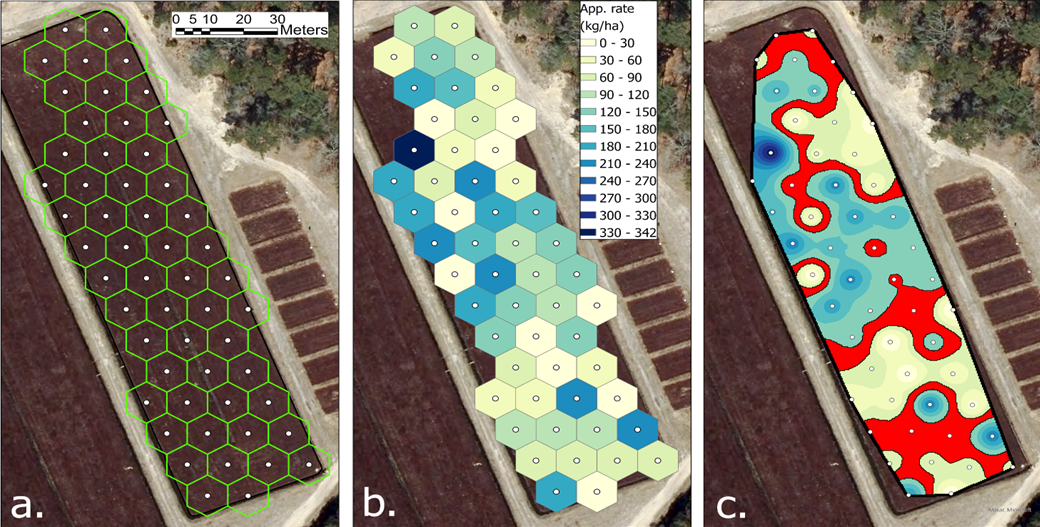
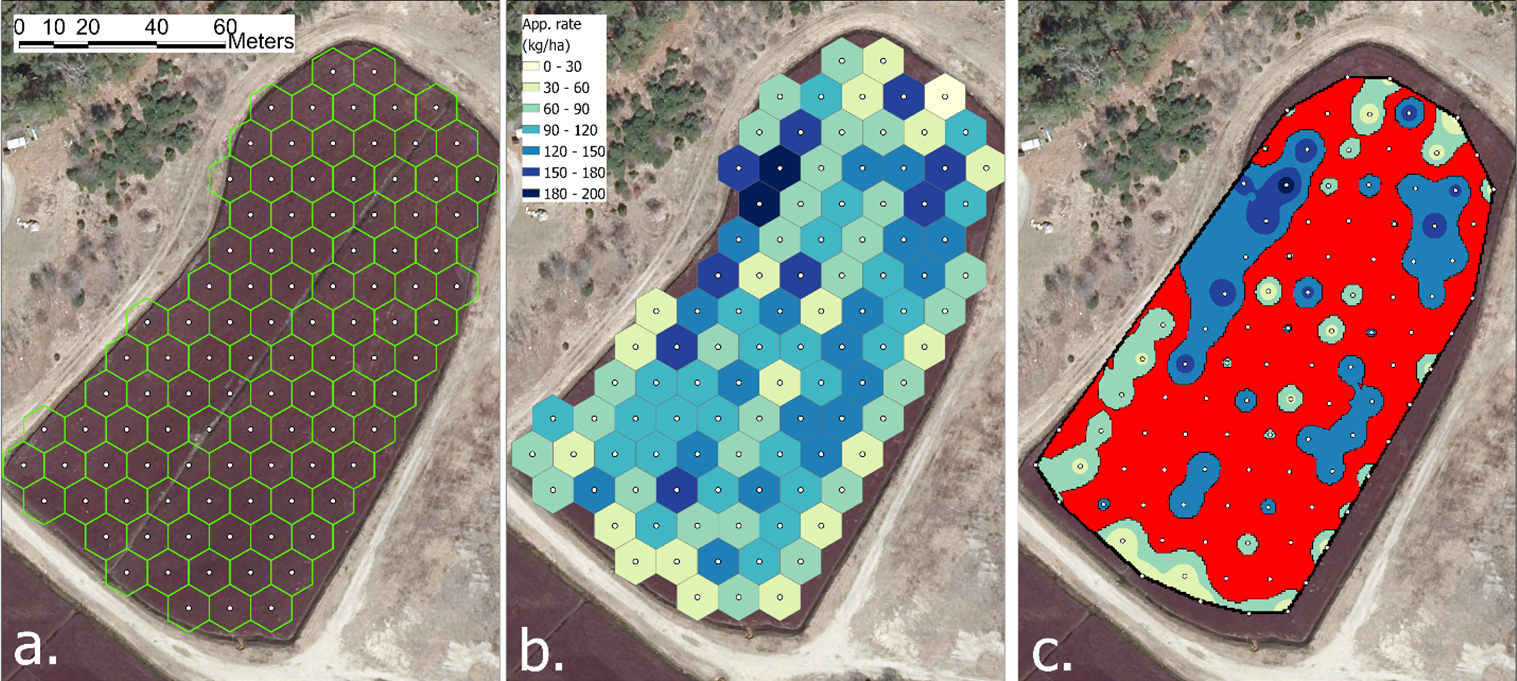
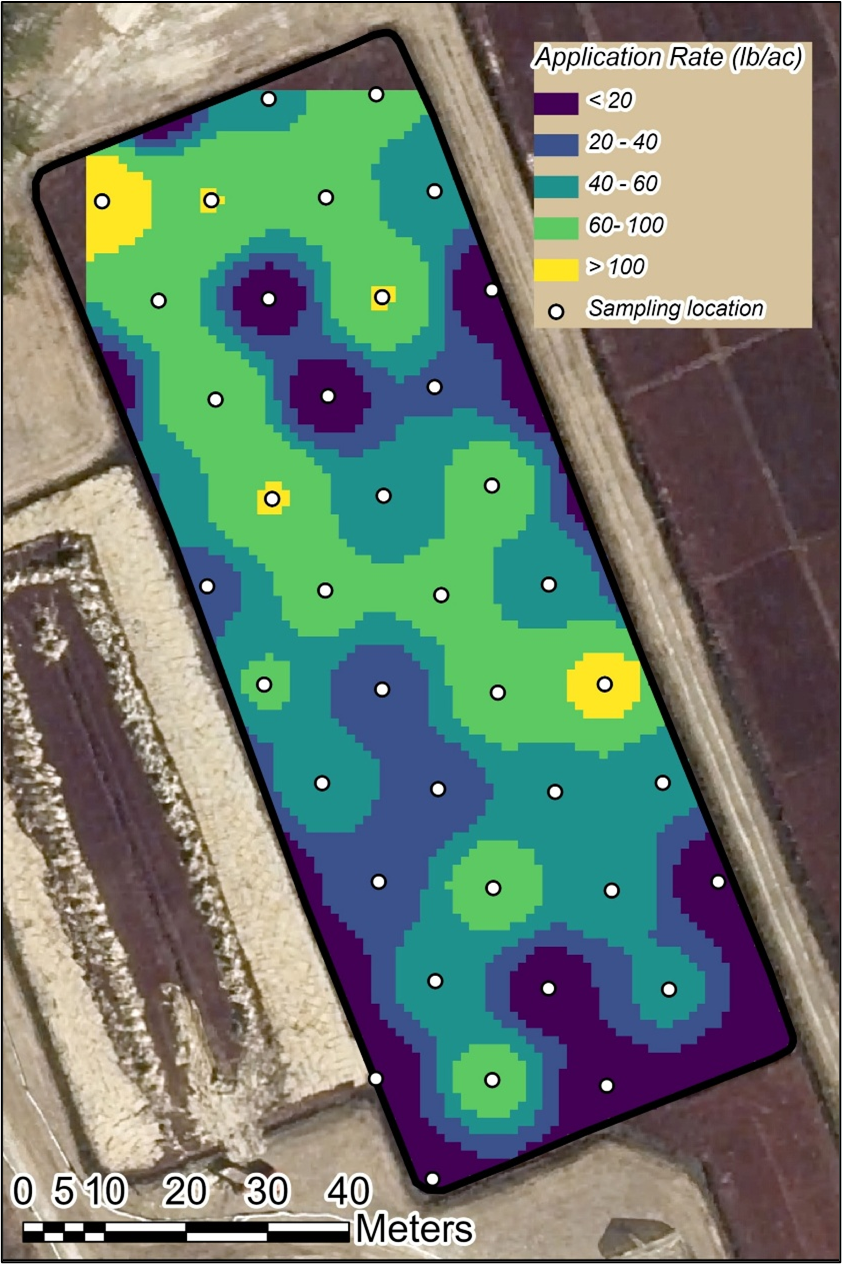
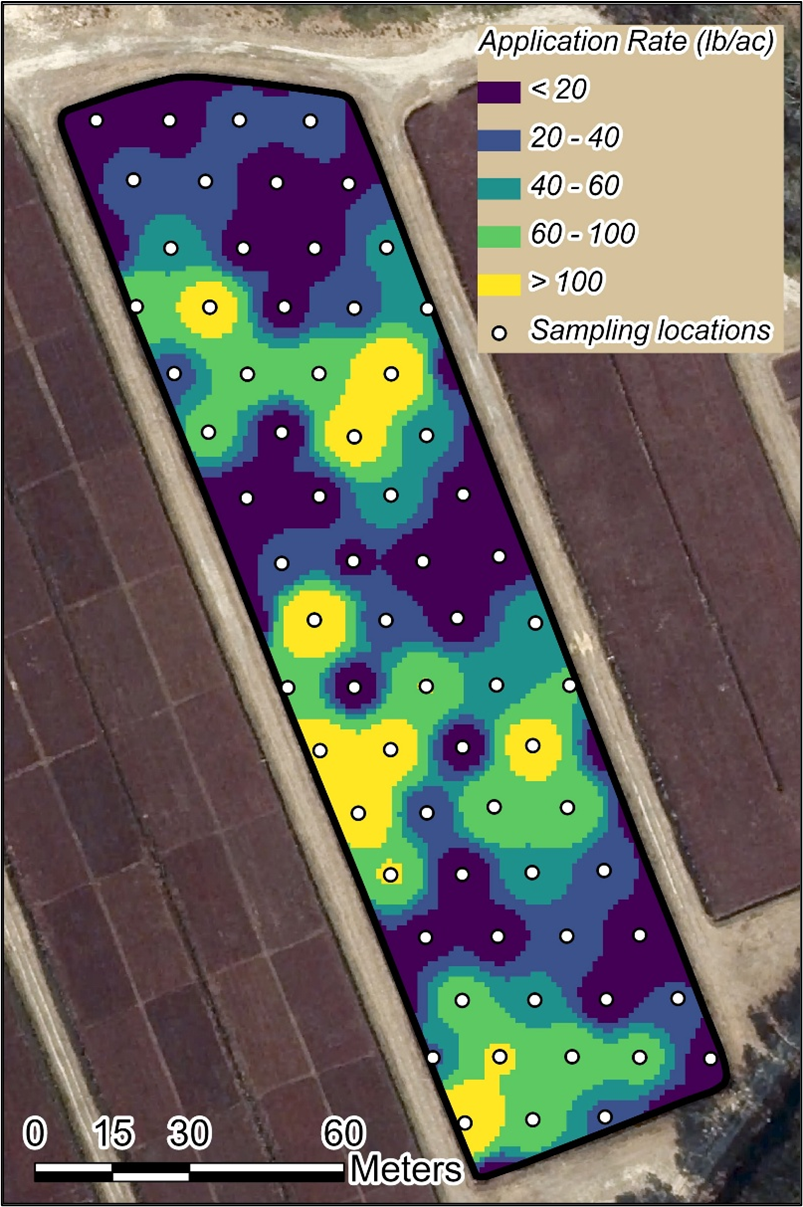
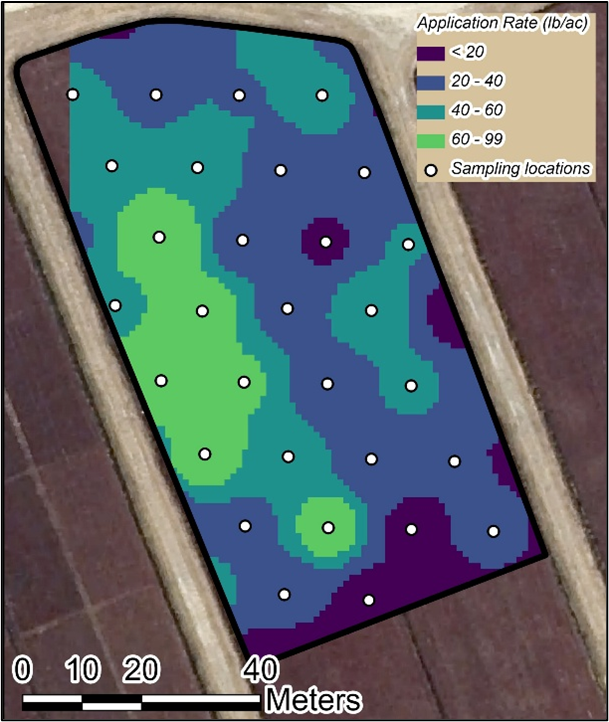
We carried out a pilot study during a helicopter-based and a hank-crank based fertilizer application event in 2022. We developed a 12-m hexagonal grid sampling strategy to reduce spatial bias in sampling and allow for roughly 50 – 100 samples for a typical cranberry bed in southern Massachusetts. At the center of each grid cell, a 7-gallon bucket was used to collect fertilizer granules, which were the weighed on a digital scale in the laboratory. Sampling locations were measured in the field with a total station and digitized in ArcGIS Pro. Using ArcGIS Pro Spatial Analyst, we utilized inverse distance weighting (IDW) to spatially interpolate application rates across the study beds (Figure 1a and Figure 1b).
2023
The following year, we carried out similar analyses during helicopter and hand-crank based applications, at 3 different beds for each method. After carrying out the pilot study, it became apparent that the height of the 7-gallon buckets, with their mouths closer to the height of the hand-crank spreader than the cranberry vines, likely introduced a bias for sampling during this application method. Therefore, we purchased 120 0.5-m x 0.5-m disc spreader calibration trays to sample granular fertilizer applied to study beds. The trays are used in agricultural industries to calibrate disc spreaders used to apply fertilizer granules, sit closer to the vines than the buckets (Figure 2), are equipped with interior baffles to avoid ricocheting granules, and may improve any bias introduced to sampling based on the height of the bucket mouths relative to the cranberry bed surface for hand-crank applications. Further, the physical dimensions of the trays were similar to those used in the scientific literature focused on UAV-based granular fertilizer application. These trays were used for all 2023 sampling events, and a 14-m hex grid sampling design was used. Fertilizer samples were collected from each tray as soon as possible following applications.

An Aerosystems West Heavy Lift Hexacopter UAV, equipped with a CFR-Innovations UGS-4G+ spreader was purchased for UAV based fertilizer applications in 2024.
2024
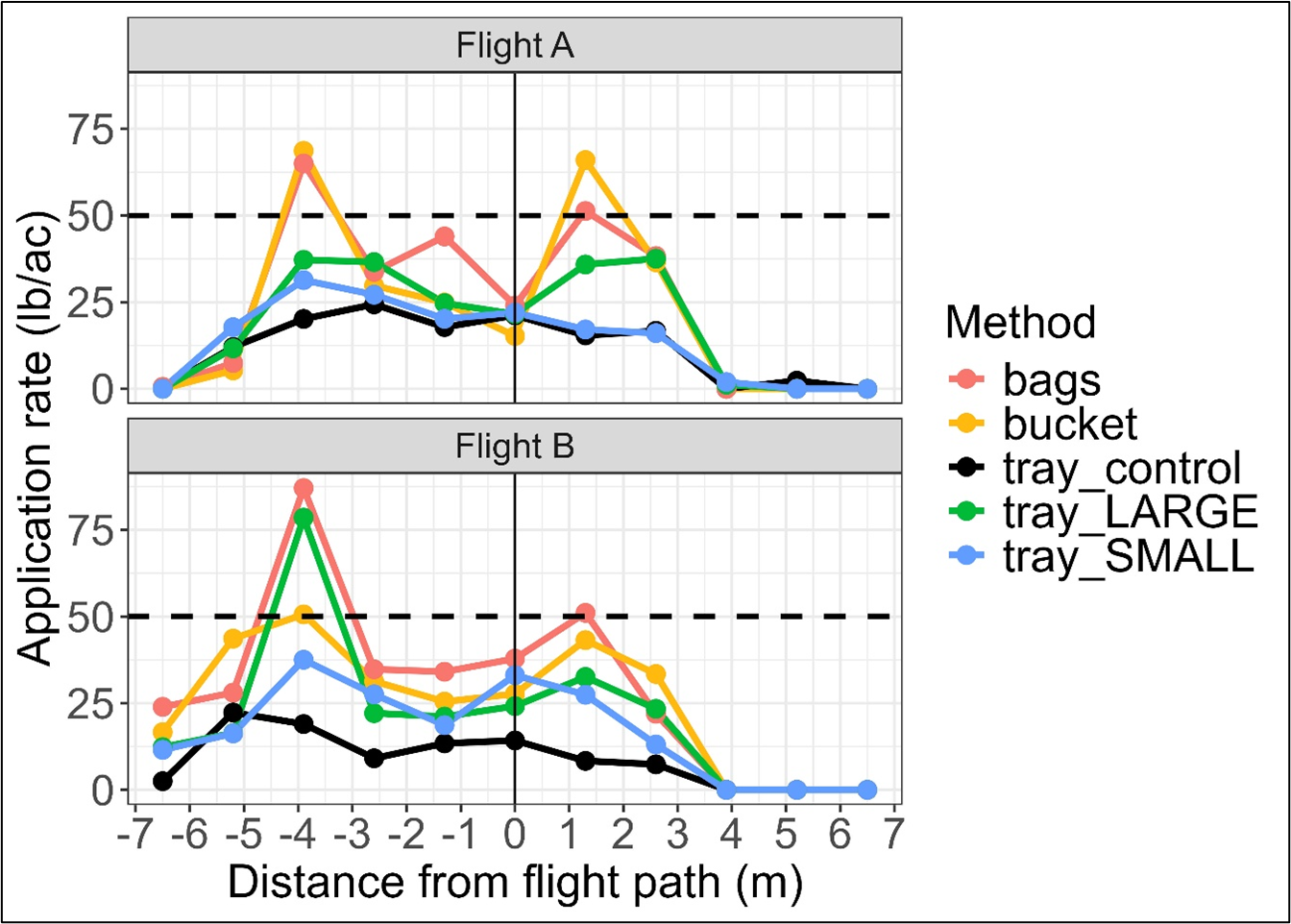
After reviewing the data from the 2023 helicopter-based fertilizer applications, it became clear that while the disc spreader calibration trays reduced measurement bias for hand-crank application, their use underestimated aerial application rates. This appeared to result from fertilizer granules ricocheting out of the trays, despite the interior baffles, possibly due to their vertical trajectory and/or greater kinetic energy upon impact. To investigate this further, we carried out aerial application test flights with the fertilizer application UAV, where we set up transects across its entire swath width, perpendicular to its flight path, using different collection methods (Figure 3). These methods included: using the calibration trays as-is (tray_control), using the trays with small bubble wrap sheeting under the baffles (tray_SMALL), using large bubble wrap under the baffles (tray_LARGE), using large plastic bags inserted in a PVC frame with the same dimensions as the trays (bags), and using the 7-gallon buckets initially used during the pilot study in 2022 (bucket).
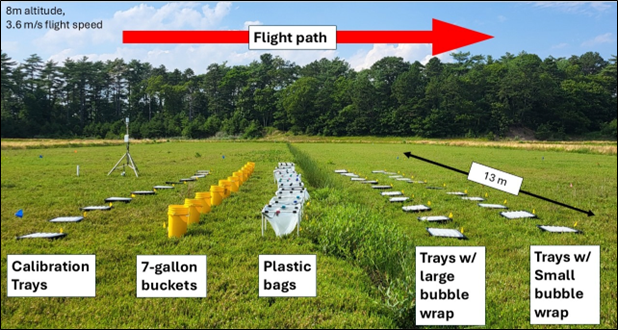
A total of 11 collection receptacles were used for each method, evenly spaced along the swath width, and fertilizer applied during two consecutive flights (Flight A and Flight B) were recorded. Among the 5 methods used, we assume that the bag method represented the closest estimate to the actual application rate on the ground, as it presumably was least likely to result in ricocheting granules.
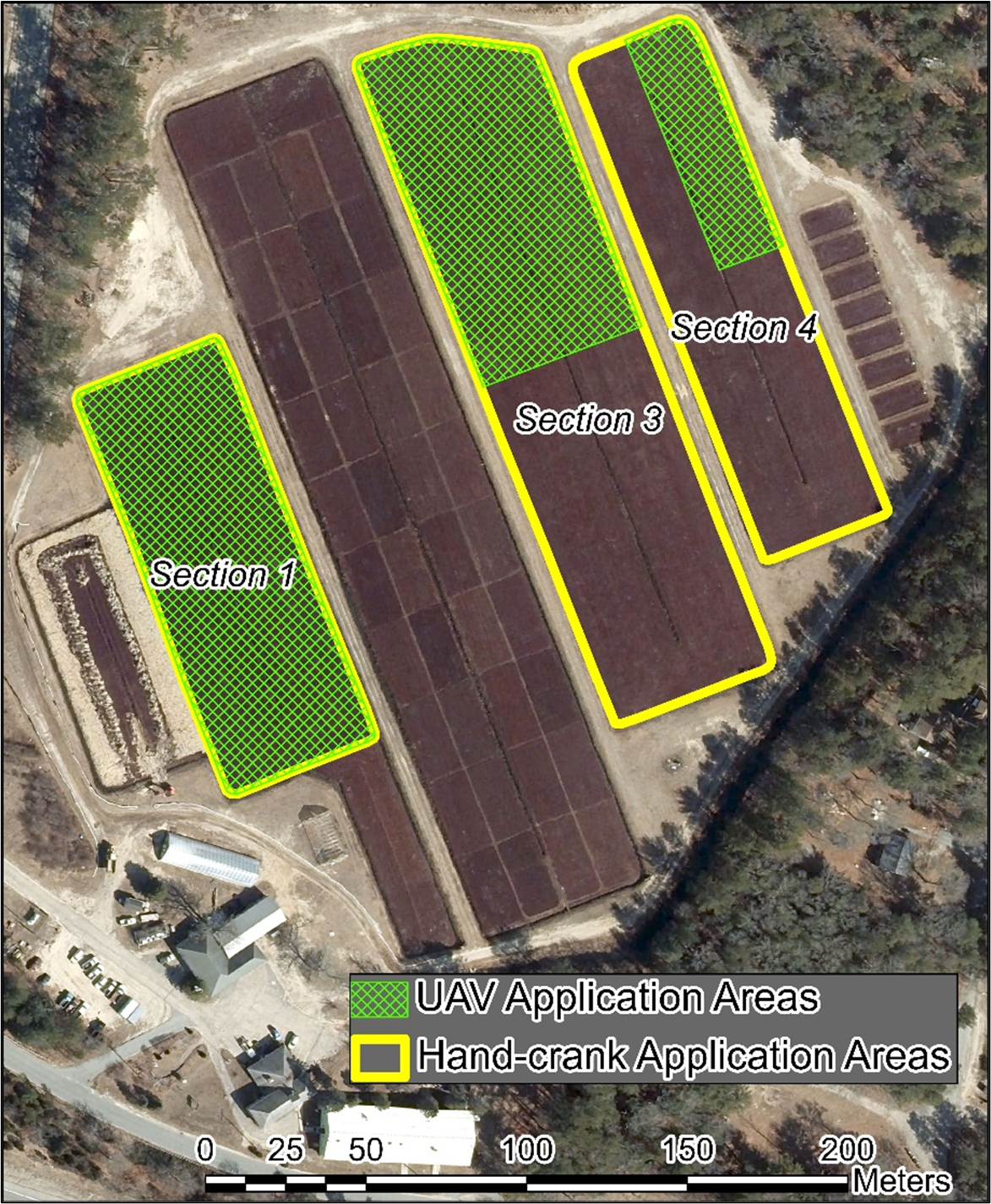
After determining an appropriate collection method, we carried out UAV applications at the same three beds as the 2023 hand crank applications, again using 14-m hexagonal grid sampling. To avoid interfering with ongoing experiments on two of the beds, a subset of the bed areas were used for UAV applications (Figure 4).
Fertilizer application UAV settings
Using an Aerosystems West Heavy Lift Hexacopter UAV, equipped with a CFR-Innovations UGS-4G+ spreader with medium throw bar, we determined optimal flight parameters to include an altitude of 8 m and speed of 3.6 m/s, for a swath width of approximately 10 m, and the spreader set at approximately 490 RPM for a target application rate of 50 lb/ac. This was based on the maximum swatch width for the UGS-4G+ spreader, at a manufacturer recommended RPMs. The altitude of 8 m ensured that the entire swath width was utilized for applications. Based on recently adopted approaches for Massachusetts cranberry growers using UAV fertilizer application, we utilized a 50% overlap with each pass.
Comparing the spatial uniformity of different fertilizer application methods
While we intended to include the use of ground rigs as an application method in this study, we were unable to find a grower using this approach and schedule a time to collect samples during application events. Therefore, we did not include this application in our analysis. Likewise, due to the discovery of fertilizer ricocheting from the calibration trays during aerial application, we were unable to use the tray-collected application data from the helicopter applications in 2023.
Nevertheless, this led us to compare various collection methods for aerial application of granular fertilizer in cranberry production. We found that using the fertilizer calibration trays with baffles (as-is) significantly (p < 0.05, Mann-Whitney U test) underestimated fertilizer being applied aerially compared to the bag method. On the other hand, there was not a significant difference in the amount of fertilizer recovered via the buckets and the bags, and the slope of the best-fit regression line between the amount of fertilizer collected via bags versus buckets was 0.99, indicating 1:1 ratio. Collection results from testing are shown in Figure 5. Therefore, we used 7-gallon buckets to measure application rates for all subsequent drone-based fertilizer applications carried out in 2024. These results highlight the importance of choosing collection receptacles that reduce the likelihood of ricocheting fertilizer granules, for cranberry growers seeking to calibrated UAV based fertilizer spreaders.
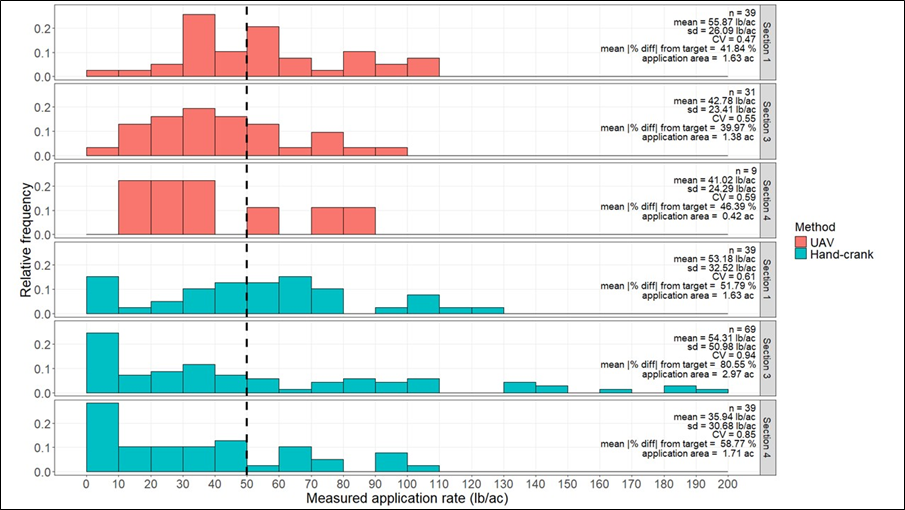
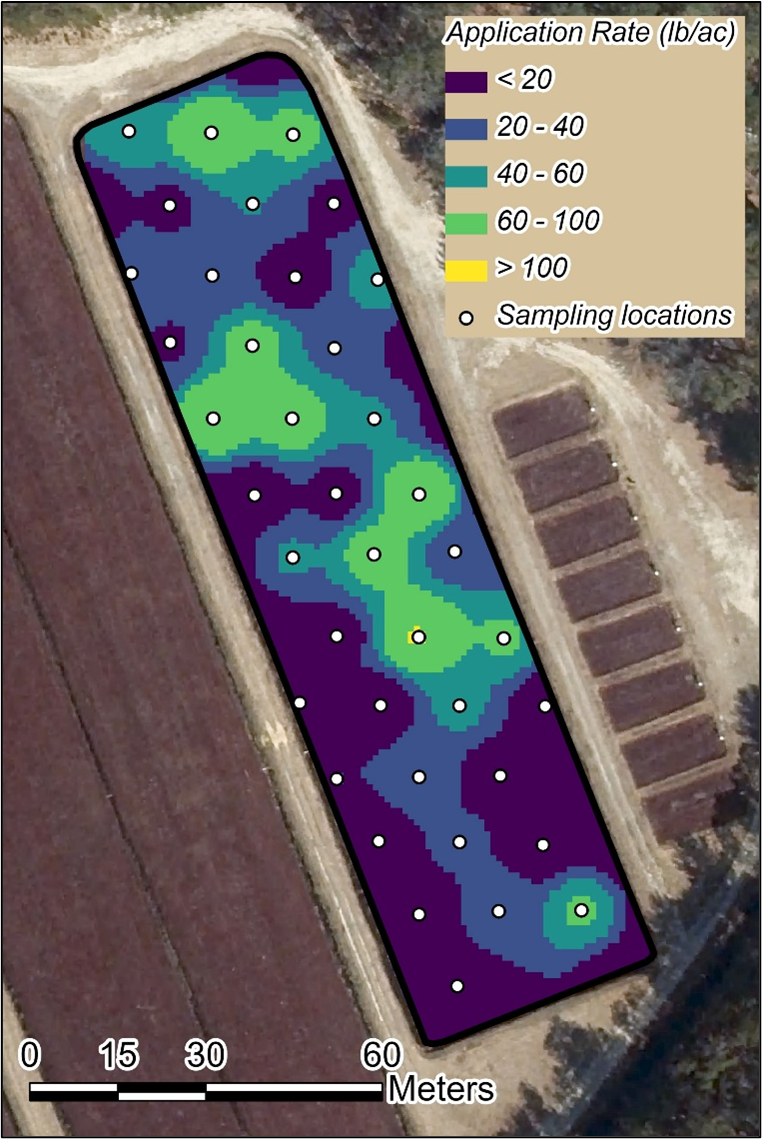
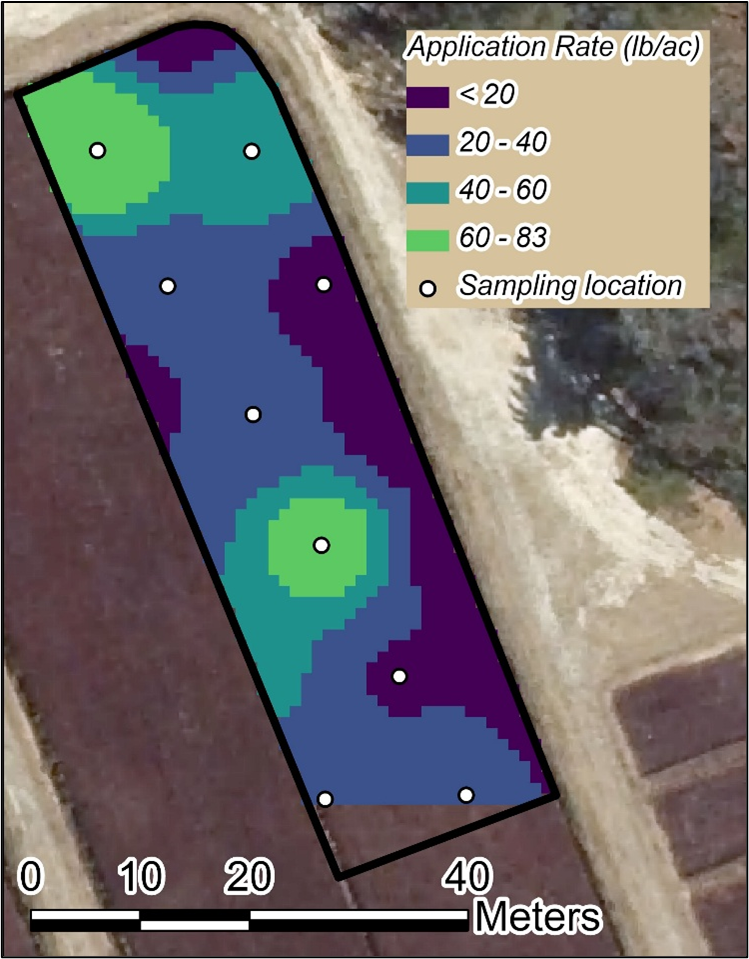
We found that, unsurprisingly, UAV based fertilizer application resulted in greater spatial uniformity of fertilizer applied in cranberries. This was observed across a range of application areas (Figure 6). In particular, hand-crank application resulted in portions of the beds that received little to no fertilizer, compared to that of UAV (Figures 7-12). This is noteworthy, because in 2 out of 3 beds, the mean application rate was within 5 lb of the target rate at the bed scale. This may be misleading in the field during and after application, particularly in instances where it appears the total amount of fertilizer used after hand-crank application for a given area may seem in line with the target rates. In actuality, in most instances, large portions of the beds received different amounts of fertilizer, either well below or above the target rate.

Ongoing research
Prior to all sampling events, multispectral image data were collected using a UAV equipped with a MicaSense RedEdge MX camera and aboveground plant biomass was harvested from a subset of sampling locations within each grid and analyzed for chlorophyll content, carbon and nitrogen content, and stable isotopes of carbon and nitrogen. Follow-up UAV flights and plant sampling at the same subset of points at each site were carried post-application, prior to any subsequent applications, to determine if there was any observable spatial variation in plant response to that of fertilizer being applied. We continue to analyze these data to evaluate the potential for remotely sensing plant nutrient status, to determine the impact of application uniformity on plant health, and also to potential generate prescriptive maps for future fertilizer applications.
Our results showed clear advantages to using UAVs to apply fertilizer over hand-crank methods. This is particularly important for Massachusetts growers where helicopter-based fertilizer application is not possible. Massachusetts growers are already beginning to use UAVs to apply fertilizer and crop protection products, and as this technology becomes increasingly accessible, its adoption among growers will likely continue to increase. Worth noting, even in the case of UAV application, actual fertilizer application rates can be considerably above or below target rates, in significant portions of the application area. Future work should further investigate different application patterns to improve uniformity and maximize application efficiency.
Education & outreach activities and participation summary
Educational activities:
Participation summary:
We presented continuous updated results for this project to over 100 people in local cranberry industry/research community at the annual winter growers meeting held by the University of Massachusetts Cranberry Station in January of 2023, 2024, and 2025.
Learning Outcomes
To our knowledge, this was the first time data were presented to cranberry growers showing the spatial variability of fertilizer being applied via different methods, including by UAV.