Final report for ONE21-381
Project Information
Project ONE21-381 was aimed at developing a High Tunnel Gantry System (HTGS) to enhance agricultural efficiency in high tunnels or greenhouses. Aimed at addressing the labor-intensive processes in high tunnels or greenhouses, the project created a system to streamline operations and improve efficiency.
Through multiple rounds of design, development, and hands-on feedback from the farming community, the Rigorous team developed key components such as a Transport Cart and an Automated Row Cover System (ARCS).
The project's findings revealed a significant reduction in labor and an increase in operational efficiency with the transport cart, which was well-received by the farming community for its practical benefits. However, the ARCS faced challenges in reliability and consistency, underscoring the complexities of automating agricultural environments.
The nuanced feedback from farmers highlighted a keen interest in technology that offers tangible benefits, steering clear of innovation merely for the sake of technology. This research not only contributed valuable insights into the potential and challenges of agricultural automation but also underscored the importance of community engagement and iterative design in developing practical technological solutions.
The learnings from this project lay a foundational understanding that will inform future endeavors in agricultural technology, aiming to blend innovation with practicality to meet the real-world needs of the farming community.
This project seeks to reduce repetitive and non-creative tasks through the use of an open-source High Tunnel Gantry System (HTGS) with two implements; a Transport Cart and Automated Row Cover System (ARCS).
- Design. We will develop a HTGS design plan. The design will include the rail, toolbar, trolley car, Transport Cart, and ARCS. We will engage farmers during the this process to inform the design and educate them on design considerations.
- Build & Evaluate. We will construct a fully functional HTGS. We evaluate the implements for functionality, ease of construction, and ease of use. We will create videos of the installation and testing process to assist other farms adopting the system.
- Research. We will quantify the labor savings of the Transport Cart and ARCS through two labor studies. We will collect labor data during peak season and compare it to a similar control environment. We will write a report detailing our findings.
- Education & Adoption. We presented the research findings, use-cases, installation, and best practices at industry webinars and conferences. We have shared drawings and designs with interested farmers. We will present the program findings at the 2024 New England Vegetable and Fruit Conference.
Repetitive, laborious, and non-creative tasks hinder small farm profitability, scalability, and innovation. Labor costs are typically the largest expense for sustainable farms. Finding and keeping reliable help is increasingly challenging and hinders farms from sustainably scaling operations.
Farmers are increasingly growing in high tunnels in the Northeast. High tunnels help farmers extend their growing season, improve plant and soil quality, reduce nutrient loss, and reduce energy use (“High...”, (n.d.)). Since 2002, there has been a 3.5x increase in small vegetable production greenhouses (Tasgal, 2019). The Natural Resources Conservation Service (NRCS) has supported more than 9,825 high tunnels across the country since 2009 (“What…”, (n.d.)).
Growing in high tunnels requires farmers to perform many repetitive tasks. Chris Callahan of UVM Extension conducted a survey of winter growers that found row cover management takes an average of 0.4 labor hours per day per 30x96’ tunnel (Callahan, attached letter, 2021). Assuming a $20 per hour wage and 120 day winter growing season, farmers pay $960 per tunnel per year. NOFA-VT conducted a cost of production analysis for high tunnel tomatoes. Harvesting greenhouse tomatoes accounts for 17.1 labor hours per 1000 ft2 (“Cost…”, 2019). Using the same 30x96’ tunnels, harvesting tomatoes accounts for 49.25 labor hours per tunnel or $985 per tunnel per year.
High Tunnel Gantry Systems (HTGS) can reduce repetitive tasks and physical requirements while saving time and enabling innovation. Existing large-scale commercial greenhouses use advanced automation to improve profitability and scalability. We are designing an affordable, accessible, and open source HTGS to allow small farms to benefit from similar innovation. We will support education and adoption of the system through farmer design reviews, demonstrations, research, and presentations.
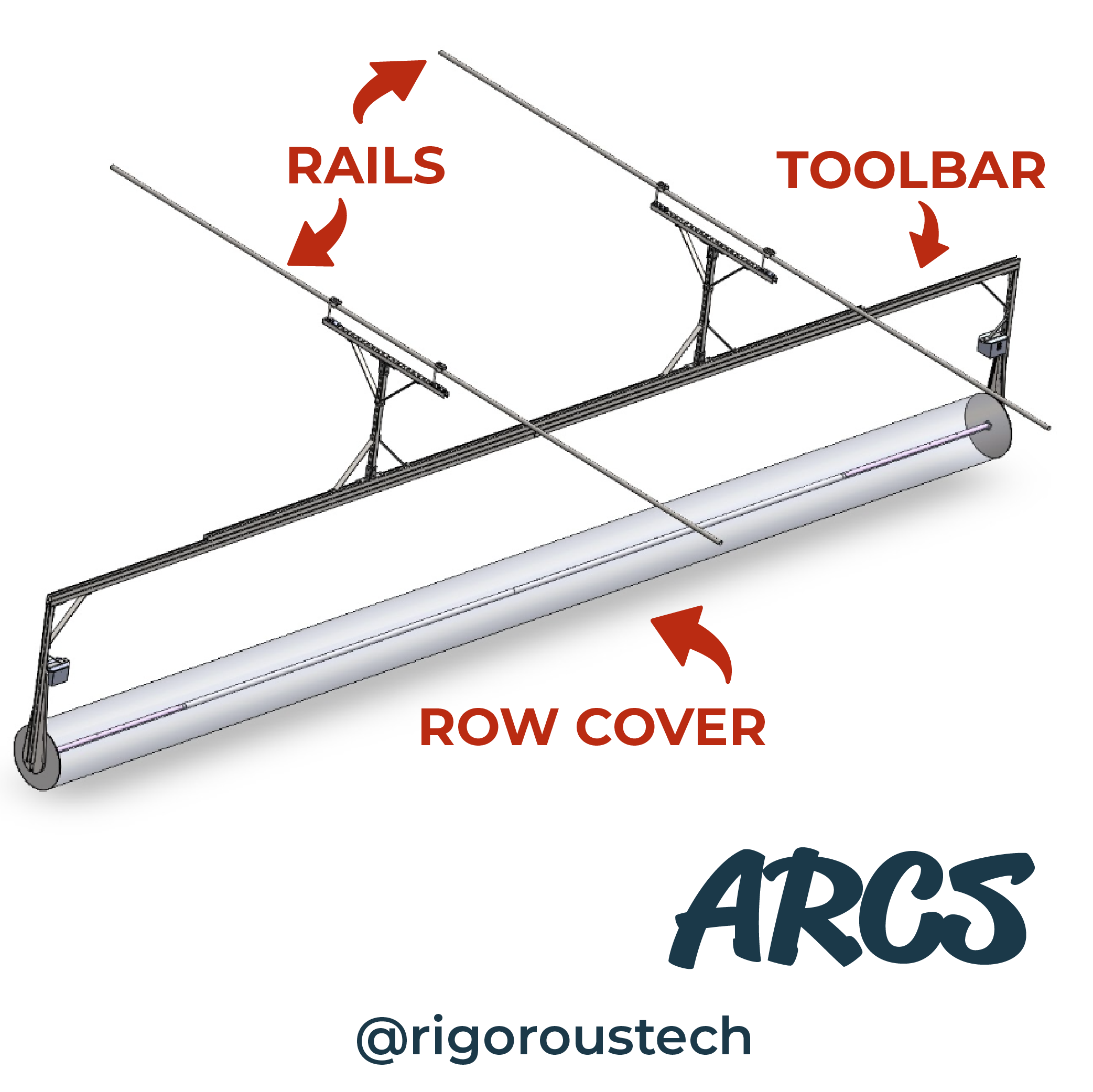
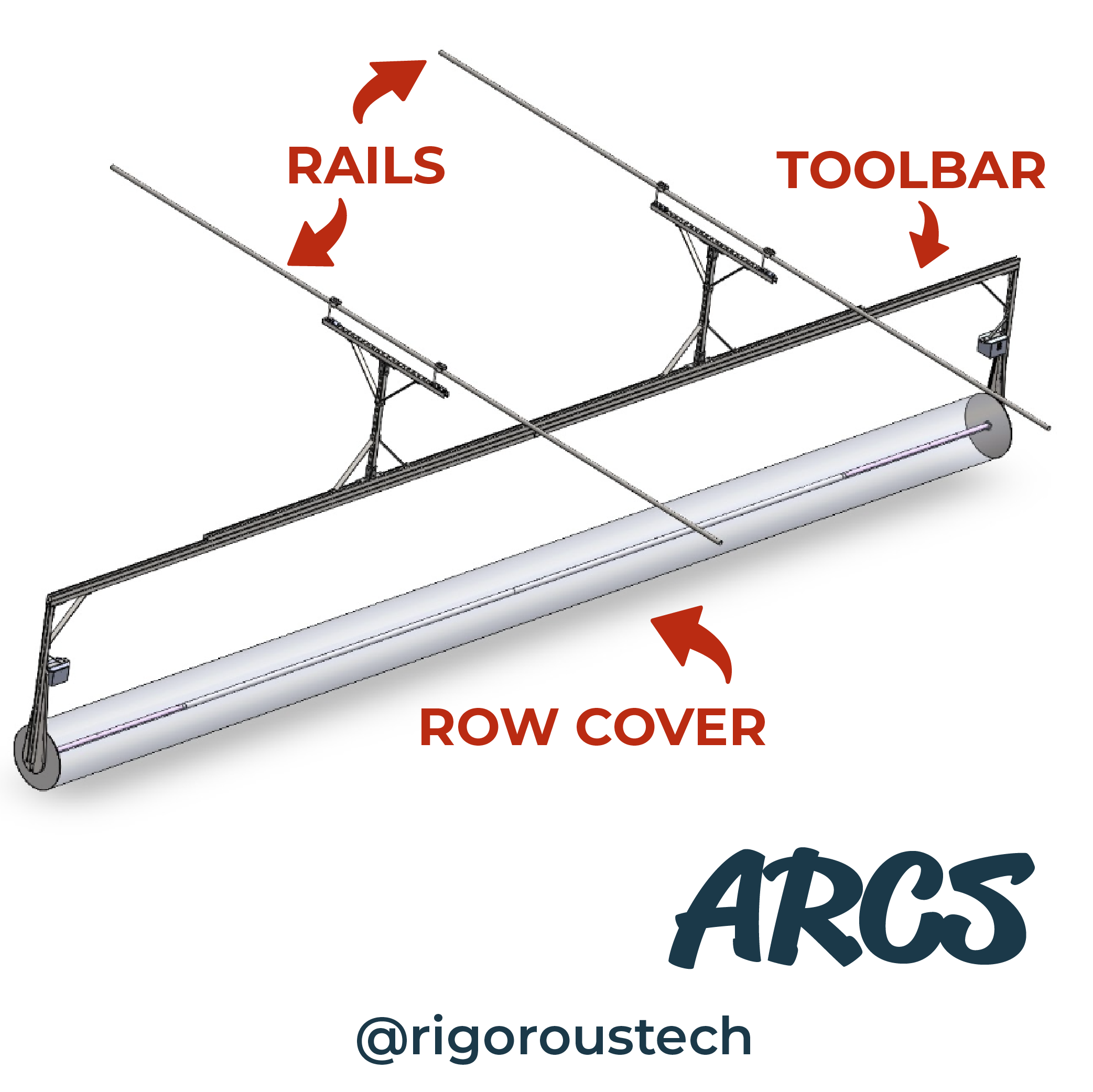
The HTGS consists of one or more overhead rails, used as a monorail or together with a toolbar. Like a tractor, the toolbar works with interchangeable implements. A trolley car moves the implements along the rails to precise locations. We will develop two implements; a Transport Cart and an Automated Row Cover System (ARCS).
The Transport Cart saves farmers time and reduces the weight they must carry. Andy Jones of ICF anecdotally found they saved 40% of labor time using a similar rail and cart system to harvest tomatoes. Assuming $985 per tunnel per year for tomatoes, this equates to saving $394 per tunnel per year, not including time saved during transplanting, bed preparation and trellising.
The ARCS removes the daily task of managing row cover. We believe farmers can optimize the cover timing to increase ventilation, lighting, and temperatures for increased productivity and reduction of disease pressure. Saving both row cover management labor and tomato harvest labor, farms can save an average of $1,354 per tunnel per year.
The HTGS represents an effort to reduce the health risks and labor costs of repetitive heavy tasks, while improving crop yield and overall quality of life for farmers. Advancements in technology can provide new jobs and space to innovate, exciting the next generation of tech-savvy farmers.
Cooperators
- - Producer
- (Educator and Researcher)
- - Producer
- - Producer
- - Technical Advisor
- - Producer
Research
Objective 1 - Design
We conducted a rigorous engineering design through two phases - a preliminary design and a critical design. After the design, prototyping, and development stages were completed, Rigorous opted to modify the proposal scope to push forward a second round of design and development to incorporate the lessons learned. Details of the updated design are in the Build & Evaluate section of this report.
As we conducted designs, we reached out for feedback from our target community. We worked with the members of our Farmer Design Review Board, conducted one one-on-one interviews with 21 regional farmers and two greenhouse manufacturers.
We began designs with the following foundational requirements and expectations. Additional requirements were gathered during the design and development processes.
- The high tunnel contains truss-style supports and extra tall side walls, largely due to the snow load and tomato trellising.
- The high tunnel has access to AC power.
- The high tunnel has access to a WiFi network.
- The Transport Cart must be less than 55 pounds.
- The Transport Cart must fit standard harvest bins.
- The Transport Cart must have an easy on/off connection to the rail.
Preliminary Design - sare_gantry_pdr_r03
At the preliminary design, we presented the concept and drafts of the mechanical, electrical and software designs. We broke the presentation into sections that explained each sub-system in detail such that the Farmer Design Review Board (FDRB) could provide feedback and critical direction.
Trolleys - Trolleys are passive rollers that allow you to hang and move items on the rail.
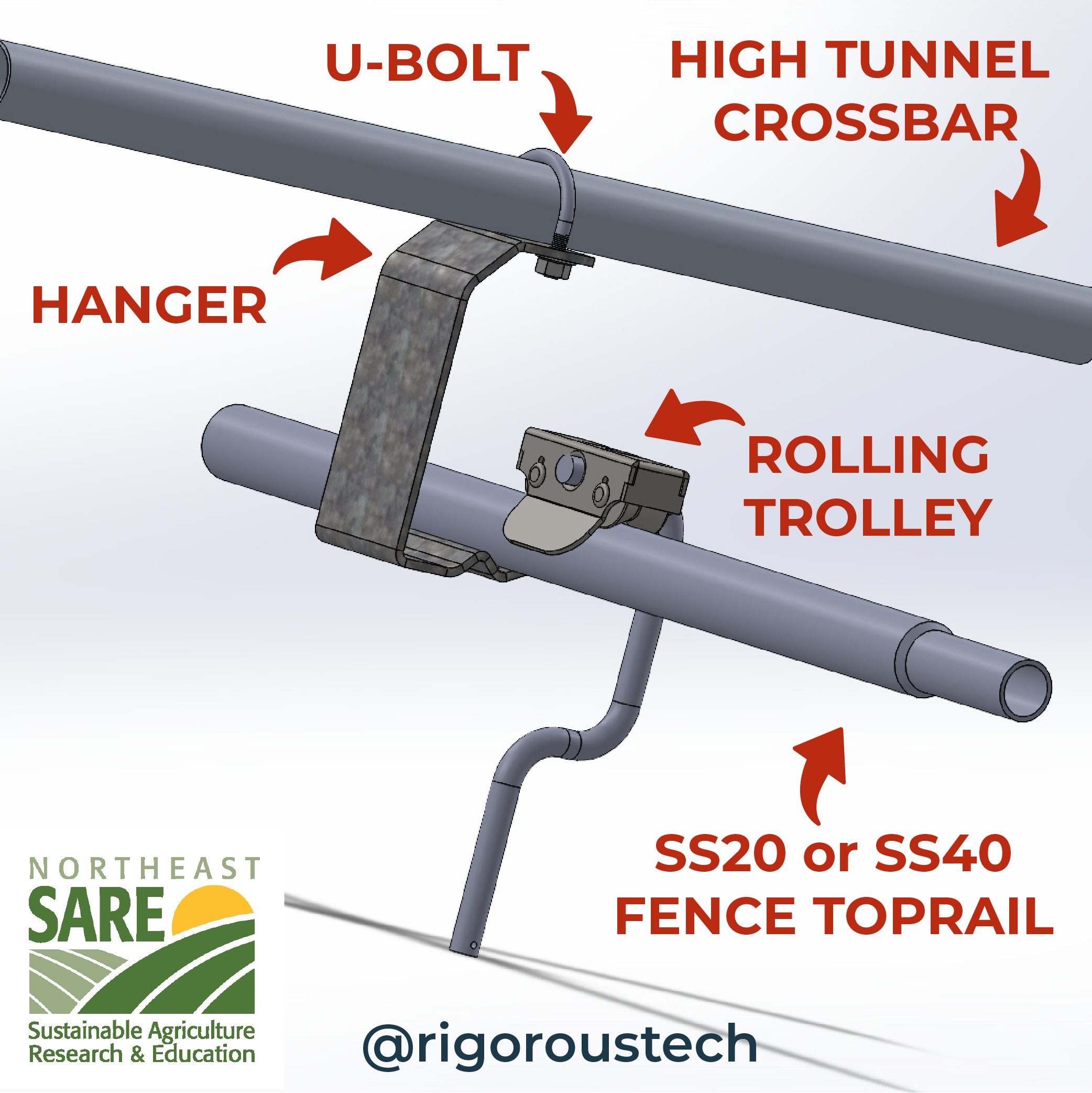
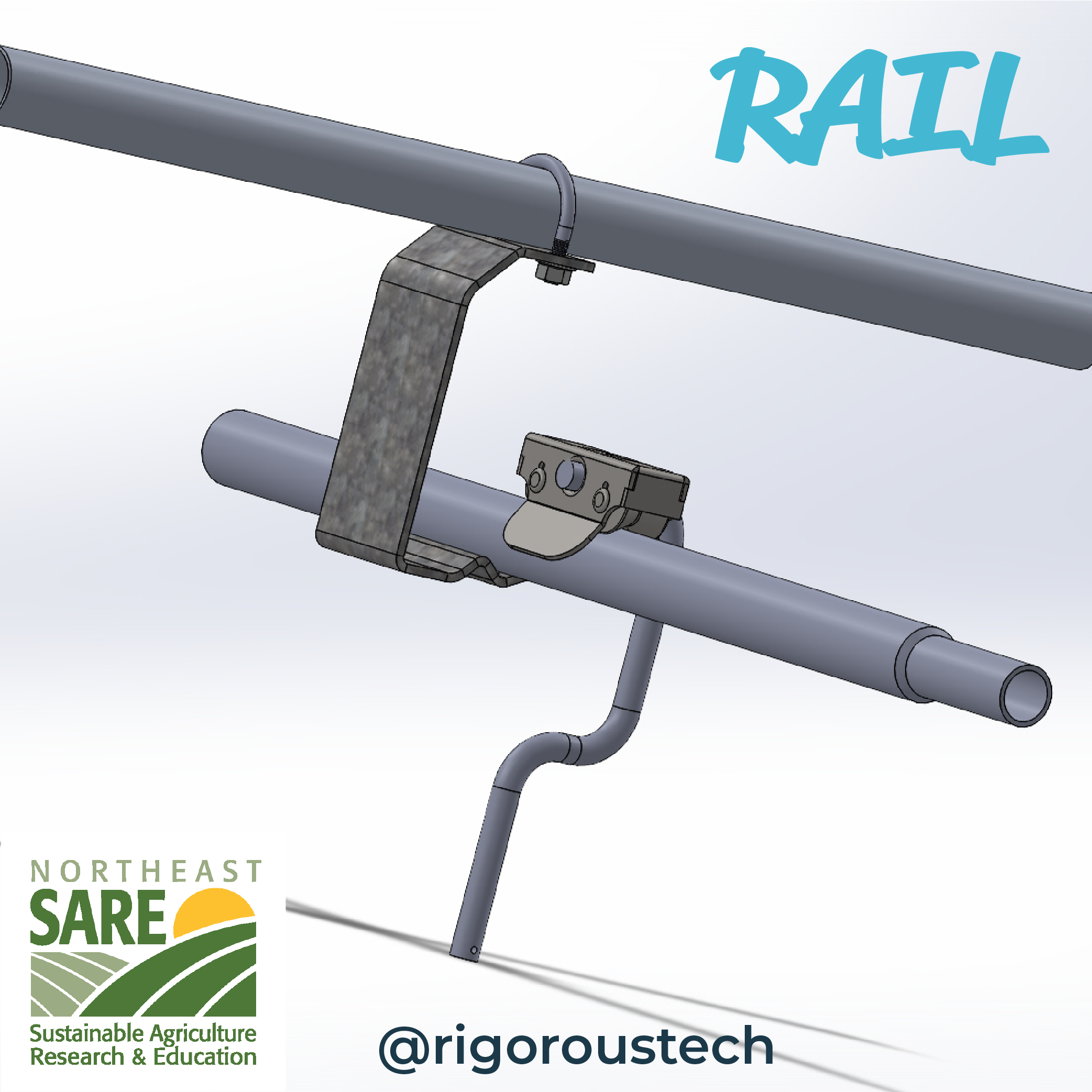
Rail System - Round tube hung from the high tunnel to allow hanging systems to move along the rail. The rail system is made from SS20 fence toprail. This is an accessible product available throughout the country. The ends are swaged, enabling them to fit together, and are secured by two screws. The rails hang from Railex brand C-bracket that are supported to the high tunnel crossbars with a U-bolt. We chose the 5.5" C-bracket to ensure ample room for the trolleys to pass between the top of the tail and the bottom of the bracket.
Transport Cart - Hanging cart used to move objects. To keep the weight low, we originally modeled the cart out of aluminum. The review board noted that aluminum is challenging to weld and therefore would not be viable for most home fabrication efforts. They recommended we change to steel. Our original design fit a variety of harvest tote sizes, from bulk crates to bread trays. The review board recommended we keep the cart as narrow as possible rather than fit a wide variety of products. In addition, they recommended we change the frame supports such that farmers could easily load the cart from the front or back without reaching around the side.
Toolbar - Generic attachment to connect various implements between trolleys. The toolbar is a generic attachment point that connects the two rails and spans the width of the high tunnel. The toolbar was originally designed to hang from passive trolleys. We presented two styles - a fixed height model and an adjustable height model. To prioritize strength and simplicity, the review board recommended the fixed height. This model is adjustable at the time of the build, so could fit different high tunnels, but not adjustable once it is built.
Trolley Car - Motorized trolley that moves along the rail to move implements. The trolley car is a motorized box that drives the toolbar along the rail. We presented a concept that pushed and pulled the toolbar. The drive system comprises a NMEA 23 stepper motor and motor controller. We have geared this up almost 10x, bringing the total force to 27 newton meters, which we determined to be sufficient to push and pull the toolbar with implements.
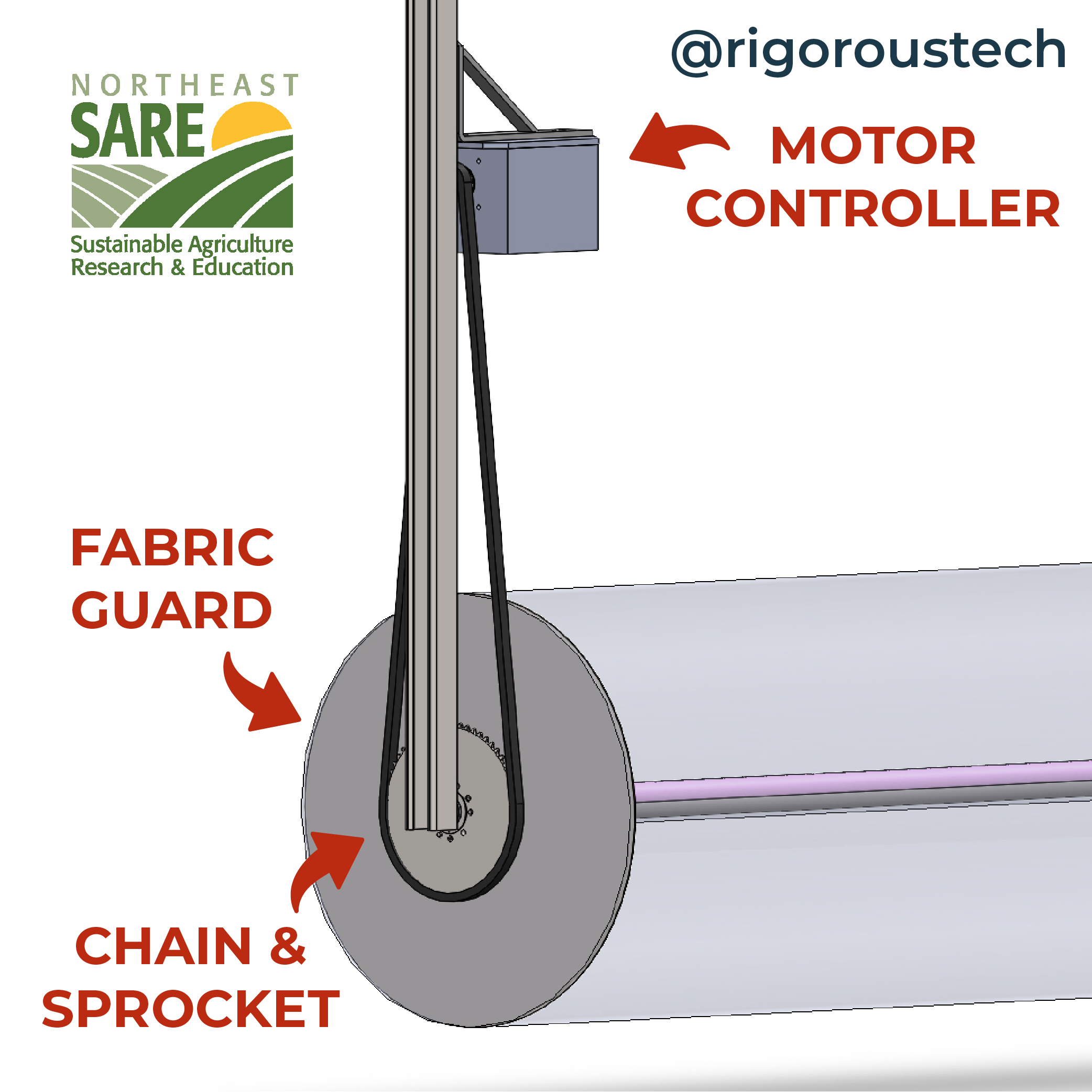
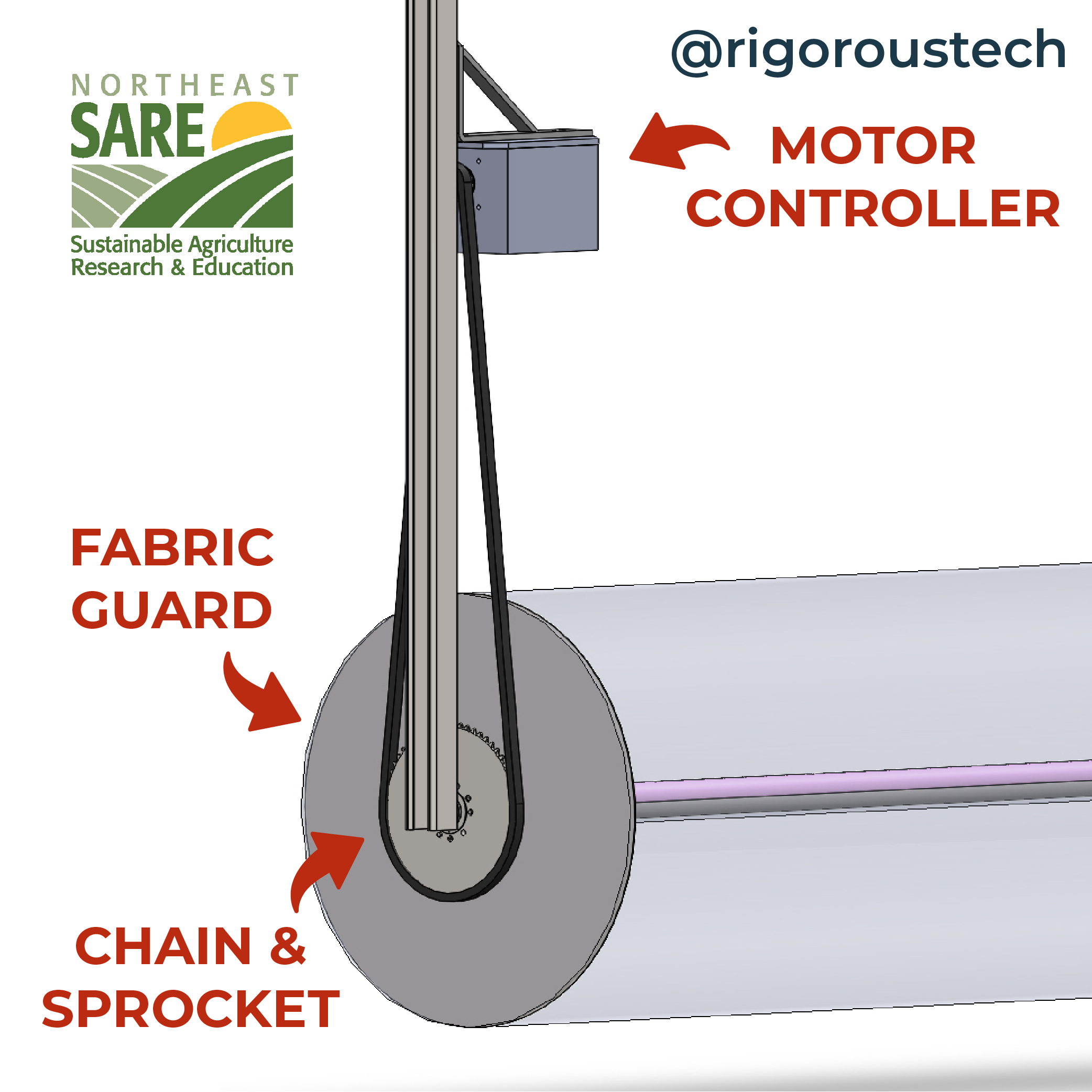
Automated Row Cover System (ARCS) - Implement designed to automatically roll and unroll row cover. It includes spooling motors at both sides of the roll and a frame that attaches the implement to the toolbar. The system also has a motor box and that motor box includes the same components as the trolley car. We estimated that we could spool a 28.5' wide roll of remay in the 30' wide house.
The concept of operations broke down the steps to set up and operate the system components, including through the user interface to the software.
Critical Design - sare_gantry_cdr_r01
In the Critical Design Review, we presented the updated and final designs, including the mechanical drawings.
One major change was to the Transport Cart. We designed the frame to fit the dimensions requested and changed the material to steel. The review board noted that aluminum would be preferable in some cases to increase potential load and that a modular/configurable cart would be ideal. They also noted that a subsequent iteration could include a support wheel underneath to further increase potential load. They noticed a design flaw where moisture could enter but otherwise approved of the changes.
We lengthened the toolbar to lower the entire system which is best able to maximize the larger width of the high tunnel at lower heights. The final height of the toolbar will be determined during assembly.
The trolley car is no longer a free-hanging unit, but is now built directly into the toolbar. The weight of the toolbar and implement will provide better traction for the system. We designed a hitch that is made out of off-the-shelf springs and hardware and 3D printed parts. These attach to the Railex rolling trolleys and connect to the motor to create the drive system.
The major change to the ARCS was that we are now using self-aligned bearings. These will allow for sag in the spool.
Objective 2 - Build & Evaluate
We constructed a High Tunnel Gantry System (HTGS) for Jericho Settlers Farm. The initial (V1) construction process was divided into phases for rail, toolbar, and implement.
Upon completion of initial system testing, the team decided to redesign key components of the system, test them indoors, and then deploy them to the Jericho Settlers Farm high tunnel for testing.
V1 Rail Phase
We had originally selected a 100 x 30’ Ledgewood High Tunnel in which to build the system as that was the house in which we had built the first prototype. Because the house had underground heat, the farmers preferred to reserve that house for early warm weather crops rather than late winter greens, so we moved to a similarly sized Rimol. We hung the rail in November, but realized after installation that this house was not level, as is common in many high tunnels. The levelness of the house was not a factor we had greatly considered as slowing and braking were not a problem in the initial prototype. We elected to change houses once again to a 200’ x 30’ Rimol. As our budget only allocated 100’ of rail, we could only hang rail in the front half of the house. This house is also not perfectly level, but the grade was amenable to development of the ARCS.
We made the rails from 1 ⅜” standard fence SS20 round tubing with swaged ends and Railex hangers which are C-brackets with U-bolts. We used two rails to span the 30’ width of the high tunnel. The rails operate independently as a monorail or together as a system. The rails are installed over the high tunnel’s walking paths such that the Transport Cart can be pushed down the rows without impeding the crops.
The Railex brackets were hung every 8’. We found that distance is sufficient for smooth travel and overall rail load requirements. Optionally you can hang the brackets at 4’ if the cost is not prohibitive and high tunnel includes 4’ spaced supports.
We tested the trolley system to ensure the system can carry designed loads and move smoothly over junctions. We calculated that the trolleys would need to pull with a typical lateral force of less than 10 pounds. While the trolleys passed smoothly over most of the junctions, it is critical that the swaged end fits snugly into the next pipe. Where there is a gap between outer diameter of the two pipes, the trolleys wheels can get hung up during travel.
V1 Toolbar Phase
The toolbar was made from generic strut channel and extends about 28’ across the high tunnel. The toolbar provides a standard interface for implements. The toolbar hangs from both rails, hung by two sets of trolleys. The toolbar carries the ARCS but not the hanging cart.
The unistrut is connected by brackets and hardware. After hanging the toolbar, we speculated that the ARCS would hang too low to the ground so we shortened the vertical bars.
V1 Implement Phase
The Transport Cart was made from welded steel 1” square tube and rail trolleys. We designed the Transport Cart to primarily carry 10-pound and 15-pound tomato flats. The steel cart weighs about 33 pounds so the system has a maximum load capacity of 225 pounds. The cart can carry twenty 10-pound flats or fourteen 15-pound flats. This cart can also be fabricated in aluminum which would allow the tool to remain unpainted. The aluminum cart would weigh 16 pounds. We chose steel to represent a product that others could more easily make or modify themselves as welding aluminum is a more specialized skill.
The trolley cars were originally made from 3D printed parts, motor, motor controller, drive wheels, sprocket, and chain. The final version of the trolley cars were made from fabricated steel and aluminum. The trolley car includes an embedded computer to automatically control the trolley. The computer ran existing Rigorous software to control the system.
The ARCS was fabricated from standard round tube, self-aligning ball bearings, spooling motors, sprockets, and chains. The row cover system spans as much of the 30’ width of the greenhouse as possible, determined by the curvature of the hoops at the height of the implement.
The ARCS includes two motorized trolley cars to move the hanging implement down the rail. As the trolley cars move the ARCS, the on-board spooling motors roll and unroll the row cover onto a spool.
V1 Testing
During initial testing, we tested the ARCS’ ability to effectively roll and unroll the row cover, the trolley car’s ability to move the ARCS, the system's ability to synchronize the two trolleys with rolling motors, and the system's ease of use.
We assembled most of the ARCS sub-assemblies off-site and put the components together at Jericho Settler’s Farm in January 2022. We first tested the system without row cover. The self-aligning ball bearings had enough play to allow the wide pipe in the spool to roll easily even with a slight sag in the pipe.
The trolley cars, as originally designed, were not consistently effective in pulling the implement up and down the rail. The motor was mounted to the top piece of the toolbar. A chain connected the sprocket on the motor to a sprocket on the trolley car. When there was any motion in the toolbar with respect to the trolley car, for example, a jiggle as it moves over a rail junction, the distance between the sprockets would contract and expand. This activity would pop the chain from the sprockets. We decided to redesign the trolley car such that the motor was attached to the trolley rather than the toolbar.
Once we redesigned and rebuilt the trolley car, we returned to swap assemblies. We used extra Railex trolleys to make cable trolleys for the extension cord. This allowed us to test running the unloaded system up and down the length of the rail. In addition, we coordinated the spooling motion of the ARCS motors with the trolley car motors.
We controlled the system through the browser-based app that we developed for the system. The application runs off of the RGS software library with a specific instance and User Interface (UI) for this project. The UI allows the operator to turn the machine on in both automatic and manual modes. As we were testing basic functionality, we used manual mode.
In manual mode, an operator can direct the system to go forward, backward, spool roll, spool unroll, or a combination of linear direction and spin which is required to roll an unroll row cover. The buttons that controlled all of the motors in tandem read “cover” and “uncover”. There is a stop button on every page.
Once the trolley cars and ARCS motors were working effectively, we loaded the ARCS with row cover for the first time. We found that the added weight of the row cover over the 28’ span of caused a significant bend in the spool. The bend in the spool caused a large moment on the spool, making it too powerful to rotate with the spooling motors.
We determined that the width of the tunnel was too long for the ARCS to work as expected. We discussed possible solutions and determined it would be possible to operate with a center support dividing two sections of row cover. To test, we folded the row cover over on itself and rewrapped it around the bar such that it covered about two-thirds of the bar. We then used a strap to hold up the center of the spool bar. The strap allowed the bar to still spin freely while supporting the weight. This worked well and we were able to use the ARCS to roll and unroll row cover for the first time.
We designed a center support system. This required us to cut the row cover into two pieces. The high tunnel had five beds when planted, so we cut the fabric to fit over 3 beds and 2 beds respectively.
We reset the row cover on the ARCS. We were able to roll and unroll the row cover along the full length of the rail. There was a gap between the two sections of row cover. Yet, when the ARCS finished unrolling, it often pulled the row cover taut, closing the gap. We ran the system multiple times and documented the progress with photos and videos.
We then broke the system down so the farmers could till the high tunnel to plant early-season potatoes. We removed the ARCS from the toolbar. The implement is easily disconnected with the removal of 4 bolts.
Once the beds were ready, we reassembled the system. By this time, the daytime temperatures in the high tunnel were consistently in the 60s and 70s. We believe the temperature and humidity were showing us new system problems that were not apparent during winter temperatures.
The trolley car glides up and down the rail with a rubber wheel. In the warmer and more humid environment, the wheel had trouble gripping the rail and would frequently spin out. This would cause the ARCS to get stuck and not complete the traverse down the high tunnel.
We came up with potential solutions to the rail grip problem. We decided to purchase adhesive sandpaper, hoping the grittiness would be sticky for the rubber.
Once the tape was adhered to the rail, we tried running the system again. Unfortunately, the tape made the grip issue worse. When the motors lost grip and began to spin out, the sand was ground off the sandpaper.
After further testing, we determined that we could not rely upon the ARCS to automatically cover and uncover the row cover without human intervention. Overall, we made significant progress on identifying the system specifications, designing a solution to meet the requirements, and testing the design in the field. We found the ARCS design did not meet the required reliability, but through this process, we have identified remaining technical challenges requiring a solution.
We decided to modify the scope of the grant to allow for another round of design and development. We then proceeded to break the system down and try to fix the trolleys off-site in our shop, shooting for a reinstallation in the 2022/2023 winter season.
Transport Cart
We finished the design of the transport cart by incorporating the farmers’ feedback from the critical design review. We sent the design off to a fabrication shop and painted the steel for rust protection. We installed it upon completion.
Development Round 2
In November, 2022, we disassembled the ARCS at Jericho Settlers Farm. We moved the ARCS to the Rigorous warehouse in Williston. We designed and built attachment points for the rail in order to build and test the ARCS indoors before reinstalling it at Jericho Settlers Farm. We did not need to modify the V1 rail, toolbar, or transport cart.
V2 Implement
We determined that the trolleys were the critical component to redesign. Not only are the trolleys critical for the ARCS, but they would be critical for any motorized or automated implement on the High Tunnel Gantry System.
We hung sections of rail from the Rigorous warehouse ceiling rafters. We then redesigned the trolleys with the following major modifications.
Drive Wheels
There are two drive wheels on the trolley rather than one drive wheel and two guide wheels. In the V1 trolley, the drive wheel was a Urethane roller attached to a gear, belt, and motor drive. The Railex trolley served as the guide wheels and the attachment point to the rail. In the V2 trolley, both drive wheels are Urethane rollers with an inward taper for maximum traction over the bend of the pipe.
Motor Placement
In the V1 trolley, the motor was attached to the toolbar, below the rail. The motor powered the drive wheel, which sat on top of the rail, by a drive shaft, chain and sprocket. The V1 trolley chain would pop off of the sprocket when the rail or toolbar was jostled, as was found to be common when moving over rail attachment points. The V2 trolley design incorporated the motor, using it as both the drive mechanism and also a counterbalance to the larger trolley bracket system. The motor is still connected to a chain and sprocket system, but there are 3 sprockets rather than 2, with one sprocket controlling each drive wheel.
V2 Testing
We rebuilt the ARCS in the Rigorous warehouse with the new trolleys. We tested the trolleys alone and then with the full weight of the toolbar and ARCS. They performed significantly better than the V1 trolleys.
We tested the ARCS in automatic mode at the Rigorous warehouse for two weeks. In automatic mode, the software controlled the ARCS and commanded it to “uncover” at 8am and “cover” at 5pm each day. After successful testing in the warehouse, we reinstalled the V2 ARCS in a high tunnel at Jericho Settlers Farm in March 2023.
After installation, the team began to troubleshoot some failures of the servo motors on the Trolleys. If either motor skipped, the trolley would lose traction on one side, the assembly would become crooked on the two rails. Said another way, as there is one Trolley on each rail, when one Trolley moves and the other does not, even for a moment, one side passes the other. When this happened, the Trolley would at times lose guidance and fall off of the rails. The passive safety rollers prevent the toolbar from falling off of the rail, but the drive mechanism no longer worked without manual intervention.
The engineers determined that the servo motors were failing while passing over the unsupported areas of the rail. The rail is supported every 8’ by C brackets. We chose 8’ increments rather than 4’ increments to reduce the cost of the rail. In the center of the 8’ span, we measured a 1” sag in the rail. When the trolleys were climbing up the slope, the servos were likely to skip steps. We tried different speed and accelerations of the trolley motors and learned that the motor is more likely to skip with higher speeds and less likely to skip with lower speeds.
The following day, we installed the row cover on the ARCS and we reduced the speed of the ARCS. Even with the reduced speed, the servo motors continued to skip steps when driving up the slope. We determined that a gearbox, different bearings, and/or different motors would be the next design improvement recommendations.
We then tested the row cover spooling. The row cover was traveling effectively for about ¾ of the 100’ span. The row cover was attached to the ARCS in two sections with a center support bracket dividing them. Because the high tunnel has 5 beds, we cut the row cover into 2 pieces that fit over 3 beds and 2 beds respectively. As the ARCS rolls the row cover onto the bar, small variations in the row cover caused the two sides to roll at different rates due to the larger and smaller diameter sizes.
We uninstalled the trolleys from the ARCS to make design modifications. We installed gearboxes to add torque to the stepper motors. In late March 2023, we reinstalled the trolleys in the high tunnel. With the gearbox and very slow speed, we were able to get the trolleys to run down the length of the greenhouse consistently.
We observed that the ARCS spooling chains, which were on each side of the 28’ span, were at times out of alignment and thus competing with each other. We removed one of the chains on the ARCS and found that the spooling system had plenty of torque with just one servo motor.
After testing the system manually, we turned on automatic mode and set the timer to automatically uncover at 7am each morning and cover at 5pm each evening. We watched the system through a monitoring camera to ensure that it acted as expected. We tested the ARCS in automatic mode at Jericho Settlers Farm for one month.
The research objective quantified the effectiveness of the HTGS by performing one labor study for the Transport Cart and one labor comparison for the ARCS.
Transport Cart
We hosted our test and control beds in the same high tunnel. Two beds with cherry tomatoes were on both sides of a single rail of the HTGS with the Transport cart.
For one month during peak harvest, we tracked data to compare labor time and harvest weights for the test and control beds. This test occurred from early August to mid September 2023. For the control harvests, cherry tomatoes were harvested into bulk crates.
The Transport Cart holds up to 16 flats per cart load. Cherry tomatoes were harvested into flats that hold 12 pounds each. The trolley holds a maximum of 192# at one time. For cherry tomatoes along 2 beds in a 100’ high tunnel, farmers only need one trip with the cart to complete the harvest.
The farmers recorded 15 harvest sessions. During this study, the farmers recorded an average of 45 seconds to walk the 100’ length of the high tunnel while manually harvesting and 58 seconds to walk the same 100’ length while pushing the cart.
With the average walking time, the farmers were able to extrapolate the expected harvest time for the reverse scenario of each harvest: the time for the control harvest in the case of the test and the time for the test harvest in the case of the control.
|
Crop |
Cart (Y/N) |
Date |
Weight (Lbs) |
Trips (No Cart) |
Time (No Cart) |
Trips (With Cart) |
Time (With Cart) |
|
Tomato, Cherry |
No |
8/2/2023 |
77.3 |
4 |
2.7 |
1 |
1.2 |
|
Tomato, Cherry |
No |
8/3/2023 |
41.2 |
2 |
1.3 |
1 |
0.6 |
|
Tomato, Cherry |
No |
8/7/2023 |
28 |
1 |
0.7 |
1 |
not recorded |
|
Tomato, Cherry |
No |
8/9/2023 |
54.6 |
2 |
1.3 |
1 |
0.8 |
|
Tomato, Cherry |
No |
8/10/2023 |
82 |
4 |
2.7 |
1 |
1.2 |
|
Tomato, Cherry |
No |
8/14/2023 |
223 |
11 |
7.3 |
2 |
3.3 |
|
Tomato, Cherry |
Yes |
8/16/2023 |
266 |
13 |
8.7 |
2 |
4.0 |
|
Tomato, Cherry |
Yes |
8/19/2023 |
183 |
9 |
6.0 |
1 |
2.7 |
|
Tomato, Cherry |
No |
8/23/2023 |
215 |
10 |
6.7 |
2 |
3.2 |
|
Tomato, Cherry |
Yes |
8/26/2023 |
105.2 |
5 |
3.3 |
1 |
1.6 |
|
Tomato, Cherry |
No |
8/29/2023 |
124 |
6 |
4.0 |
1 |
1.9 |
|
Tomato, Cherry |
Yes |
9/2/2023 |
130.1 |
6 |
4.0 |
1 |
1.9 |
|
Tomato, Cherry |
No |
9/5/2023 |
134.7 |
6 |
4.0 |
1 |
2.0 |
|
Tomato, Cherry |
Yes |
9/8/2023 |
176.5 |
9 |
6.0 |
1 |
2.6 |
|
Tomato, Cherry |
Yes |
9/11/2023 |
234.9 |
11 |
7.3 |
2 |
3.5 |
|
Total |
99 |
66.0 |
19 |
18.4 |
The farmers extrapolated a labor savings of 47.6 hours over 15 harvest sessions when utilizing the Transport Cart. At a rate of $15/hour, the Transport Cart would save farmers $714 in labor costs in a one-month period of one 100’ high tunnel.
During those 15 harvests, the farmers would have taken 19 trips with their harvest with the cart, as opposed to 99 trips with their harvest without the cart, which significantly reduces the amount of weight carried and distance traveled.
The farmers recorded additional data for 10 of the 15 sessions, including specific times and bed length distances for each harvest. They found that the cart allowed them to harvest 22 more pounds of cherry tomatoes each hour and cover an additional distance of 10 bed feet each hour.
|
Harvest |
Sessions |
Total Weight (lbs) |
Average Harvest Weight (lbs) |
Total Harvest Time (hours) |
Average Pounds per hour |
Total bed length (ft) |
Average ft per hour |
|
Test |
6 |
1,095.7 |
182.6 |
6.9 |
158.8 |
537 |
77.8 |
|
Control |
4 |
979.8 |
108.9 |
5.1 |
136.6 |
346 |
67.8 |
ARCS
Over the 2022/2023 winter season, the farmers at Jericho Settlers Farm tracked the time taken to cover and uncover their high tunnels. They found that it takes their crew an average of 3 minutes to cover and 4 minutes to uncover one 96’ high tunnel. With 15 high tunnels, it takes farmers an average of 45 minutes to uncover and 60 minutes to cover all tunnels, or a total time of 1.75 hours / 105 minutes.
The ARCS was present in one high tunnel. Over the course of one month, it covered and uncovered thirty times each, and thus equates to 3.5 hours / 210 minutes of manual row cover tending.
If the ARCS were tending row cover 20 days/month for 4 months of each year, there would be an annual labor savings of 9.3 hours / 560 minutes. At $15/hour, one 96’ high tunnel with an ARCS would save $140 per year.
Analysis
The Transport Cart offers a fast and uncomplicated return on investment. The costs of those components are as follows:
|
Component |
Price |
Notes |
|
Cart Fabrication |
$594 |
|
|
SS20 Pipe |
$580 |
180’ of 1 ⅜” SS20, enough for 2 beds in a 96’ high tunnel |
|
Railex Rail Supports |
$370 |
|
|
Railex Trolleys |
$80 |
|
|
Consumables |
$50 |
|
|
Total |
$1,674 |
We have demonstrated a $714 labor savings per month per 96’ high tunnel with a Transport Cart. Assuming each tunnel has at least a 3 month harvest window in each annual period, the Transport Cart can help farmers save $2,142 per year in labor required to walk harvested crops through the high tunnel. This represents a payback period of .78 years.
The results of this analysis demonstrate a positive ROI. The Transport Cart does not require electricity, internet, or significant infrastructure changes.
The ARCS, as designed, would cost around $5000 in materials to build and has a significantly lower labor savings, as compared to the Transport Cart. The most significant benefits to farmers would not be in a clear ROI, but in intangible benefits. By setting an automatic system, farmers can optimize the time, temperature, and humidity to maximize light and ventilation on crops. Many farms have reduced staff in winter and at times ignore row cover management. While some see a benefit to the hands-off approach, many farmers have found success with a lesser management of row cover and thus do not consider it a significant pain point.
Education & outreach activities and participation summary
Participation summary:
We have begun one on one interviews to determine feasibility and desirability of the High Tunnel Gantry system. We toured and interviewed Mira and Dakota Miller of Row by Row Farm (Hurley, NY), Tony and Joie Lehouiller of Foote Brook Farm (Johnson, VT), and Paul and Sandy Arnold of Pleasant Valley Farm (Argyle, NY). We also received general feedback from farmers at Intervale Community Farm (Burlington, VT) and Ardeen Farm (East Aurora, NY).
We looked to understand current season extension activities, barriers to winter production or expansion, infrastructure, and use of new or unconventional technologies.
We hosted a preliminary design review and a critical design review for the Farmer Design Review Board which has set us up to construct the system in January 2022. We will test the system for about one month and will then schedule an on-farm workshop and demonstration that is open to the public.
We have started to post regularly to our Instagram account. This includes the creation of graphics from our design files. We have posted designs for feedback as well as shorts of us constructing components of the system (images below) and recaps of farm tours. While this project is not the only thing we post about on the @rigoroustech account, we have reached 10.7K accounts in the last 90 days. We have 190 followers, the majority of which are farm or food system-based accounts. Project-related posts have reached up to 627 accounts each with up to 41 likes and 12 comments. We regularly receive a handful answers to posed questions, mostly asking about growing practices and soliciting design feedback.
We hope to leverage this channel to drive awareness to the workshops and digital resources. We wrote a blog that summarizes the project and plan to continue to write blogs and tutorials. https://www.rigorous.co/blog

![]()

During the design and development stages of the High Tunnel Gantry, we engaged a number of farmers for feedback and to gauge general interest. Some of the interviews were held by the principal and those included farm tours and in-depth discussions. Many of the interviews were held by a group of University of Vermont MBA students through a volunteer consulting project. Those interviews were held on the phone and typically lasted about 15-30 minutes.
We had a standardized set of questions for each farmer interview in order to understand how many farmers had the infrastructure and growing practices that could benefit from the High Tunnel Gantry. Those questions included:
- Do you have (a) high tunnel(s) or greenhouse(s), if so, how many?
- Do your greenhouse/high tunnel structures have access to electricity?
- Do your greenhouse/high tunnel structures have access to wifi?
- Do you do winter production or season extension?
We also asked farmers about their opinions about open source technologies, their production focus, the task they’d love to automate, and solicited feedback on the designs of the ARCS and hanging cart.
|
Question |
Response |
Range |
|
Do you have (a) high tunnel(s) or greenhouse(s), if so, how many? |
100% Yes, n=19 |
1-20 |
|
Do your greenhouse/high tunnel structures have access to electricity? |
94% Yes, n=19 |
The “no” expects to have electricity by Spring 2023. Many responded that some, but not all, houses have electricity. |
|
Do your greenhouse/high tunnel structures have access to wifi? |
21% Yes, n=19 |
Some have wifi but it doesn’t reach the entire farm, some use IMonnit System to connect to home router, some could add boosters if necessary. |
|
Do you do winter production or season extension? |
76% Yes to season extension or winter production; 48% Yes to winter production, n=21 |
Infrastructure
All farmers had at least one high tunnel or greenhouse on their farm. Almost every respondent indicated that they had electricity in at least one high tunnel or greenhouse. Some, such as Cate Farm, have electricity in all houses in order to operate HVAC, alarms, fans, and temperature sensors. Others, such as Row by Row Farm, have electricity in the main houses but not in houses in the back fields. The only respondent who indicated that they did not have electricity in any high tunnel has plans to implement in the Spring of 2023. This does not appear to be a barrier.
Wifi does appear to be a barrier for the majority of farmers. While some farmers have options to boost wifi signal to specific areas of their farm, the vast majority did not see a path to bringing wifi to their high tunnels. Many who did have wifi noted that it was not reliable.
The vast majority of farmers (76%) do some sort of season extension. Only 48% of respondents grow during the winter. Of those who do, many grow spinach, kale, chard, and pac choi. Some of these farmers are scaling down winter operations or plan to grow only crops that over-winter until the Spring. Farmers indicated that effective management of temperature and humidity was a barrier to winter production. Many farms grow early and late season crops in their high tunnels in the Spring or the Fall. Crops grown include beets, carrots, lettuce, potatoes, onions, and greens.
ARCS Feedback
One hypothesis that we wanted to test was whether managing row cover was a pain point for many Northeast farmers. Some farmers, including the teams at Sunrise Farm, Pleasant Valley Farm, Good Heart Farmstead, and Ardeen Farm have scaled back winter production in recent years. Edge of Good Heart Farmstead relayed, “we’ve stopped growing winter greens entirely because we dislike row covering so much.” Other farmers indicated that winter production was too much work for the off-season, still others are transitioning their farms and decreasing specialty production as they do so. We have heard farmers express that row cover was at one time a major pain point for them but they stopped managing it intensively or at all. Danielle from Root 5 Farm noted, “different veggies require different row coverage timing throughout the winter season and they do not consider row cover to be that labor intensive”.
Some farmers believed that automated row cover systems would save time. Some would be interested in an outdoor row cover system, others would be interested but do not plan to put resources towards such a project, wondering if the setup time and expense would create a positive return. Cara of Evening Song Farm said, “we would expect a major investment to pay back within 3 years, but beyond that, it’s an improvement to the quality of life for them. We hate doing row cover and have even considered not growing greens because of it.” A farmer at Evening Song Farm noted that managing row cover takes about 80 labor minutes to manage row cover each day and is a task that makes staff grumpy. Elmer Farm noted that management of row cover would only be applicable for 3-4 months of the year and the cost would have to show a clear return on investment. Overall, we found that farmers were generally interested, but our hypothesis that row cover is a major pain point was not confirmed. Many farmers expressed appreciation that engineers were working on products for small farms.
Transport Cart Feedback
Farmers overall were interested in the Transport Cart. They appreciated the simplicity of the system and that it does not take up any floor space inside their high tunnel or greenhouse. The farmers at Foote Brook Farm thought that a ladder attachment would be especially useful for hanging tomato trellises. The farmers at Jericho Settlers Farm would be interested in an adjustable Transport Cart that could adapt to different functions and be inexpensive. They also suggested a wheel on the bottom such that the cart could take heavier loads than the high tunnel’s frame may support without causing damage.
Opinions on Open Source Technologies
Some farmers love the idea of open source technologies. Those farmers tend to feel comfortable with do-it-yourself assemblies, retrofitting older technologies to new systems, or fixing machinery in-house. Other farmers did not care about the technology being open source, some thought that the technology would be untested and unreliable. I believe all farmers who have shown interest would only be interested in a functional product; no farmers expressed interest in continuing to develop or tinker with the technology themselves.
Opinions on Automation
Quite a few farmers were interested in automation in general, but not “tech for tech’s sake”, as a farmer at Boneyard Farm expressed. Farmers easily thought of ideas for tasks that they would automate on their farms, and the views were quite diverse. We did not ask what each farm paid their staff, but some shared that general labor rates were as high as $20-$25/hour. This makes farmers want to focus their staff on high value tasks rather than time-intensive monotonous tasks that could be done by a machine. Ideas included:
- Shredder and mixer to spray mulch
- In row weeding for small scale farms
- Watering, irrigation
- Moving clear plastic for weed capturing
- Washing and drying
- Greenhouse side rollups, vents, temperature controls
- Night curtains
- Seeding flats
- Mower
Learning Outcomes
Thus far, we have shared detailed information with our collaborators (4 farmers) and the farmers we have had one on one interviews with (28 farmers, 24 farms). These farmers now have a deep understanding of the system we seek to build and have been able to provide critical feedback to influence the designs. They have also been able to conceive of additional ideas for the high tunnel gantry, displaying understanding of its potential in their operations.
We presented the findings of this program to 231 participants at a Winter Webinar series run by Vermont Veg & Berry Growers' Association.
We will present the findings at the New England Vegetable and Fruit Conference in December, 2024.
Project Outcomes
The implementation of the High Tunnel Gantry System (HTGS), particularly the transport cart, marked a significant transition in the practices of cooperating farmers at Jericho Settlers Farm and holds promise for broader agricultural communities. Through this project, the farmers experienced a tangible shift in their daily operations, leading to several notable benefits and improvements on their farm. We have had two farmers, besides our partner farm Jericho Settlers Farm, reach out for the drawings and schematics of the Transport Cart and rail system.
Behavioral and Practice Changes: The adoption of the Transport Cart led to a significant reduction in the physical strain associated with manual harvest processes. Farmers reported a more streamlined workflow, as the cart facilitated easier and faster transport of produce within the high tunnel. This efficiency not only reduced labor time but also minimized the physical toll on farm workers, contributing to improved worker satisfaction and potentially reducing employee turnover.
Resulting Benefits and Improvements:
- Labor Efficiency: The most pronounced benefit was the labor savings. This efficiency translates into a substantial reduction in labor costs and a notable increase in productivity, allowing farm staff to allocate their time to other critical farm operations.
- Economic Impact: The Transport Cart's ROI is compelling, with the farm witnessing significant cost savings. This economic benefit enhances the farm's financial sustainability and could be a critical factor in its long-term success and growth.
- Quality of Life: Farmers expressed a noticeable improvement in their quality of life, attributing this to the reduced physical strain and time savings. The ease of use and efficiency of the transport cart allowed for a less stressful and more rewarding work environment.
Success Story and Quotes: A success story that stands out involves a farmer at Jericho Settlers Farm, who noted, "The transport cart has transformed our harvest days. What used to be the most grueling part of our week is now more manageable and less time-consuming." This sentiment echoes the positive feedback received from other farm staff, underscoring the system's impact on their daily operations and overall job satisfaction.
Conclusion: The HTGS project, through its focus on practical and impactful innovation, has catalyzed a positive change in farming practices at Jericho Settlers Farm. The success of the transport cart serves as a testament to the project's value, offering a model for other farms to improve efficiency, reduce labor costs, and enhance the quality of life for farm workers. As the project continues to evolve, its outcomes underscore the potential for targeted technological solutions to make a meaningful difference in the agricultural sector.
The High Tunnel Gantry System (HTGS) project, with its focus on developing and implementing a transport cart and an Automated Row Cover System (ARCS) within high tunnels, offered a unique insight into the intersection of technology and agriculture. Reflecting on the project's approach, several key aspects contributed to its success, while certain challenges prompted valuable learnings and highlighted areas for further study.
Key Success Factors:
- Collaborative Design Process: Engaging directly with farmers and incorporating their feedback into the design and development stages was instrumental. This collaboration ensured that the solutions developed were aligned with the users' actual needs and preferences, enhancing the project's relevance and impact.
- Iterative Testing and Development: The phased approach to testing and refining the HTGS components allowed for continuous improvement and adaptation, which was crucial in developing a transport cart that significantly benefited the farmers. This program only planned to undergo one design and development process, but found the most useful findings would only come from an additional design and development round.
Challenges and Methodological Revisions:
- ARCS Reliability: The challenges faced with the ARCS underscored the complexity of automating agricultural processes. The reliability issues highlighted the need for a more robust design and testing process, perhaps incorporating a wider range of environmental conditions to better simulate real-world use.
- Technological Adaptation: While the transport cart was a success, the mixed results with the ARCS suggest a need for a more nuanced understanding of when and how to integrate automation in agriculture effectively.
Project's Question and Future Use: The project successfully addressed its core question of whether a transport cart and ARCS could enhance efficiency and reduce labor in high tunnels. The Transport Cart, with its clear benefits, is a practice we plan to continue promoting. However, the ARCS, given its current challenges, requires further refinement before broader promotion and adoption.
Additional Work Needed: Further research is essential to enhance the ARCS's reliability and user-friendliness. Studies could explore alternative materials, more resilient design frameworks, or advanced control systems to improve its performance and adaptability to different high tunnel environments.
Beneficiaries of Project Findings: The project's insights would be particularly valuable to:
- Farmers and Agricultural Practitioners: Especially those utilizing high tunnels, who can directly benefit from the labor savings and efficiency gains demonstrated by the Transport Cart.
- Agricultural Engineers and Technologists: Who can build upon the learnings from this project to develop more effective and reliable agricultural automation solutions.
- Agricultural Educators and Extension Services: Who can use the project's findings to inform their guidance and support to farmers considering the adoption of similar technologies.
In conclusion, while the HTGS project has yielded significant positive outcomes, particularly with the Transport Cart, the journey to fully realize the potential of automation in agriculture continues. The lessons learned provide a valuable foundation for future innovations, ensuring they are grounded in practicality, farmer-centric design, and continuous adaptation to the evolving challenges and opportunities within the agricultural sector.