Final report for OS22-160
Project Information
In the proposed research, a smart and low-cost directed optical energy weed management robotic platform for sustainable agriculture will be made to address the issue. The high throughput directed energy weed management is a novel technology for sustainable weed management. Since it does not involve the use of chemical weed removal solutions, it will enable practical weed management for producing organic food. The low-cost features of the robotics platform will enable the affordability of the robotics platform to farmers especially socially disadvantaged farmers. The smart and integrated features of the robot will ensure user-friendliness and easiness of operation and most importantly the smart decision-making capability for practical weed management.
The novel directed energy weed management platform will be built for high throughput and diversified weed removal. In contrast to conventional weed removal methods, directed energy weed removal method does not involve the use of environmentally harmful chemical agents for sustainable weed removal. The novel robotics-based directed energy weed removal method is precise and easily automated. A new high throughput optical weed detection sensor will be built for high speed and high accuracy weed removal. A wide spectrum UV light weed removal technique will be used for improving weed removal efficiency. The directed energy weed management platform will be integrated with a low-cost robotic platform to achieve autonomous directed energy weed removal. It is expected that the low-cost directed energy pest management platform will be adopted by small-sized farms for effective weed removal.
The affordable autonomous weed management robotics platform is designed specifically for low-income, new, and socially disadvantaged farmers. In contrast to the conventional agricultural robot, which is often expensive to make and maintain, the proposed robot is centered by low-cost design principles for both production and maintenance thus practical to be adopted by a wide range of farmers. The extensible features of the low-cost robot will enable it conveniently interface with other equipment to construct a complete precision agriculture ecosystem. The autonomous functions of the robot from navigation to weed management will remove the barrier of technical challenges faced with new farmers thus alleviating the difficulties of new farmers for weed management.
Directed energy is an important weed removal technique for integrated weed management. The method utilizes directed energy sources such as microwave, flaming, steaming for weed management [23, 24, 25, 26]. The method does not use harmful chemical agents and has also proven capable of weed management. While the benefits are clear, the current directed energy methods are known associated with a few fundamental challenges. First, the integration of directed energy weed management solutions with the robot is difficult. Previous research has attempted to attach the directed energy setup to a robotics platform, but the setup is often bulky thus difficult to operate in the field. Additionally, there is little to no software integration in terms of mapping and navigation integration [27]. Second, directed energy weed management is energy inefficient. For instance, microwave weed control requires the energy of 1000 - 3400 Kg/ha rendering it an impractical weed control technology [28]. Similarly, the low thermal efficiency of flaming pest control is also a practical concern, where only 15% of energy can be effectively utilized [28]. For CO2 laser-based direct energy solution, the energy conversion efficiency is poor, about 10% of the electrical-optical conversion rate, which thus limits the actual adoption of this technology [29]. Furthermore, the inefficient energy utilization makes it difficult to strategically integrate the energy source to the robotics platform making the entire platform rather heavy in size and weight thus the short run time. Third, the speed of weed removal using a directed energy approach is slow. The current optical weed control method requires the use of either CO2 laser or an ultraviolet light bulb as the light source. For either approach, it will take a considerable amount of time from 0.5 second to 2 seconds to deliver sufficient energy for deactivation or removal of weed[29]. Fourth, the current directed energy weed control method is most effective for early stage weed removal which further limits its practical usage in practice [28, 29].
The proposed research is built on top of the principal investigator’s previous research accomplishments. It includes research on optical sensing and laser development. It will ensure the successful conduct of the proposed directed energy optical source. The proposed robotics platform is hinged on the principal investigator’s previous experiences in building various agricultural robotic platforms thus ensuring the successful delivery of the final product. More specifically, three goals have been set up for the project.
Goal 1: High throughput Directed Energy Source Development and Testing. Novel high throughput Directed energy equipment will be developed for effective weed management. Novel optical scanning-based wide spectrum ultraviolet light sources will be experimented with and validated. A new optical weed detection system for rapid detection of weed will be developed such that high-speed weed detection and removal will be achieved. The efficiency of weed removal with the solution will be tested on Batey Farms.
Goal 2: Affordable Robotics Platform Development and Testing. The proposed platform will be at the price of 5,000$ in contrast to the average of 50,000 $ for the existing agricultural robotics platform. The affordable robot will be tested on the soybean field of Batey Farms.
Goal 3: Smart Robot Control, Data Analysis Pipeline Development and Testing. The importance of big data and artificial intelligence on sustainable agriculture has been well demonstrated [30, 31]. For this, a smart robot control and data analysis pipeline will be developed. Specifically, modern computer vision algorithms will be built for accurate path planning and automatic return to home for recharging. Furthermore, data analysis for the effectiveness of weed management will be presented in a user-friendly smartphone interface to control the robot and visualize the data. We will test the smart data analysis pipeline on Batey Farms asking Brandon Whitt to operate the robot using the smartphone app by himself. Problems will be identified through this process thus to improve the pipeline.
For achieving the three goals to maximize weed management efficiency, we propose to build the IWM robotics platform. The platform will be built based on the principal investigator’s previous research experiences [32, 33, 34, 35, 36, 37, 38]. Overall, we will utilize novel optical science, computer vision, and engineering technology for building the platform.
1: Novel Directed Energy For Weed Control
Non-chemical-based directed energy weed control methods will be utilized for weed control. The technology has been piloted and proven successful in the control of weed [32, 33]. The limitation and bottleneck of the technology however is a slow speed and low weed removal efficiency [39]. We propose a novel technology to enable a higher throughput weed removal system by a strong integration of new weed detection and weed removal components into one platform. Based on our recent findings, a high speed and lower cost weed detection optical system will be developed [40, 41]. Our previous research has shown that the high accuracy optical-based image classification is feasible to improve the classification accuracy to over 20%, which will serve as the base for the new high resolution based weed detection method [34, 37, 38]. To improve the weed removal efficiency further, a wide spectrum approach will be experimented for a more rapid cut or irradiation of weed for removal. This unique approach does not require increasing the power of a single light source but is able to offer stronger weed removal efficiency.
Energy efficiency is critical for the practical application of directed energy for weed management. The wide spectrum technique will be used for increasing energy efficacy thus increasing the efficiency of thermal damages to the weed for more efficient weed removal [42]. Importantly, the energy-efficient Ultraviolet Diode will be used for weed removal to address the energy efficiency bottleneck faced with the directed energy technique. Optical scanning-based beam steering will further save energy and improve energy efficiency [43, 44, 45]. The integration of the directed energy platform into the cost-efficient robot will be also experimented to validate the robotics run time based on the energy requirement of the directed energy and the weight of the platform. The hardware interface between the directed energy platform will be also built using the CAN bus interface such that the light source can be conveniently controlled with the computer on the robotics platform.
2: Affordable, Extensible, And Autonomous Robotics Platform
To reach a wide range of farmers especially socially disadvantaged farmers and new farmers, the weed control robot needs to be cost-effective. To minimize the cost, the design of hardware will extensively utilize inexpensive high-strength plastic materials. The number of motors will be also minimized with optimized output torque to further save cost. In particular, the navigation of the robot will be relying on the PI’s recent research discovery showing the effectiveness of the single-camera approach for autonomous robot navigation [35, 36, 37]. It has been known that the cost of sensors is a significant portion of conventional robotics platforms. For example, a Velodyne Lidar sensor can cost up to 8,000$. RTK GPS costs up to 3,000$. The single-camera robot navigation approach is expected to significantly reduce the cost to the lowest. To enable practical deployment of the robot in the field, the electronics and computer hardware will be waterproofed thus reducing the reliance on weather conditions.
The extensibility of the robotics platform is one major focus on the development of the platform. It involves the standardized hardware including the chassis, the choice of motor, the control circuit board, the standard CAN bus communication protocols with the low-cost camera, GPS, and IMU sensors. As such, it is convenient for the robot to be extended for further development and practical farm applications. With regard to software standardization, ROS software suit will be used for the operation of the robot, which will enable flexible control as well as data synchronization with other sensors. The standardization will make the robot easier to repair and troubleshoot, making it practical for farmers to adopt it.
3: Smart Robot Control, Data Analysis and Visualization Pipeline
Smart data analysis is essential for effective weed management. A heavy focus of the data analysis pipeline is to further develop our existing computer vision algorithms to ensure the autonomous navigation of robots only with a single camera[35, 36, 37]. Simultaneously, the vision-based navigation method will co-work with GPS and IMU sensors for effective vision odometry to precisely guide the robot. The second major focus is to create a novel weed detection method based on our camera array Fourier Ptychography deep learning-based image classification method [38] to collect a wider field of view crop information. The collected data are further subjected to data processing to identify weed in real-time to achieve efficient weed removal. The standardization of the data analysis pipeline will be also performed. The standardized modular design of the software will be using JSON as data communication protocol. JSON data will be fed into a Lightweight Javascript-based web portal to present farmers with a friendly smartphone user interface to allow farmers to operate the robot and inform Farmer of the weed recognition results and removal efficiency. As such farmers can make timely and informative decisions on planning weed management. A smartphone app will be also built for farmers to operate the robot. Farmers will also visualize the status of the weeding process and outcome easily through the app.
References
[1] Nick R Bateman, Angus L Catchot, Jeff Gore, Don R Cook, Fred R Musser, and J Trent
Irby. Effects of planting date for soybean growth, development, and yield in the southern usa.
Agronomy, 10(4):596, 2020.
[2] AndrÅLe Devaux, Peter Kromann, and Oscar Ortiz. Potatoes for sustainable global food security.
Potato Research, 57(3-4):185–199, 2014.
[3] Frits K Van Evert, Spyros Fountas, Dusan Jakovetic, Vladimir Crnojevic, Ilias Travlos, and
Corne Kempenaar. Big data for weed control and crop protection. Weed Research, 57(4):218–
233, 2017.
[4] Prajal Pradhan, GÅNunther Fischer, Harrij van Velthuizen, Dominik E Reusser, and Juergen P
Kropp. Closing yield gaps: how sustainable can we be? PloS one, 10(6):e0129487, 2015.
[5] Olumide S Daramola. Timing of weed management and yield penalty due to delayed weed
management in soybean. Planta daninha, 38, 2020.
[6] SP Singh, S Rawal, VK Dua, S Roy, MJ Sadaworthy, and SK Charkrabarti. Weed management
in conventional and organic potato production. 2(6), 2018.
[7] Adam S Davis and George B Frisvold. Are herbicides a once in a century method of weed
control? Pest management science, 73(11):2209–2220, 2017.
[8] Surendra K Dara. The new integrated pest management paradigm for the modern age. Journal
of Integrated Pest Management, 10(1):12, 2019.
[9] Mohammed S Abubakar and ML Attanda. The concept of sustainable agriculture: challenges
and prospects. In IOP Conference Series: Materials Science and Engineering, volume 53, page
012001. IOP Publishing, 2013.
[10] Soroush Parsa, Stephen Morse, Alejandro Bonifacio, Timothy CB Chancellor, Bruno Condori,
VerÅLonica Crespo-PÅLerez, Shaun LA Hobbs, JÅNurgen Kroschel, Malick N Ba, Fran.cois Rebaudo,
et al. Obstacles to integrated pest management adoption in developing countries. Proceedings
of the National Academy of Sciences, 111(10):3889–3894, 2014.
[11] Zhixi Tian, Jia-Wei Wang, Jiayang Li, and Bin Han. Designing future crops: challenges and
strategies for sustainable agriculture. The Plant Journal, 105(5):1165–1178, 2021.
[12] Pepijn Schreinemachers, Victor Afari-Sefa, Chhun Hy Heng, Pham Thi My Dung, Suwanna
Praneetvatakul, and Ramasamy Srinivasan. Safe and sustainable crop protection in southeast
asia: status, challenges and policy options. Environmental Science & Policy, 54:357–366, 2015.
[13] DA Mortensen, L Bastiaans, M Sattin, et al. The role of ecology in the development of weed
management systems: an outlook. WEED RESEARCH-OXFORD-, 40(1):49–62, 2000.
[14] Alec F McErlich and Rick A Boydston. Current state of weed management in organic and
conventional cropping systems. In Automation: the future of weed control in cropping systems,
pages 11–32. Springer, 2014.
[15] Jerry M Green and Micheal DK Owen. Herbicide-resistant crops: utilities and limitations for
herbicide-resistant weed management. Journal of agricultural and food chemistry, 59(11):5819–
5829, 2011.
[16] Vijay K Nandula, Krishna N Reddy, Stephen O Duke, and Daniel H Poston. Glyphosateresistant
weeds: current status and future outlook. Outlooks on Pest Management, 16(4):183,
2005.
[17] Ian Heap and Stephen O Duke. Overview of glyphosate-resistant weeds worldwide. Pest
management science, 74(5):1040–1049, 2018.
[18] Stephen B Powles. Evolved glyphosate-resistant weeds around the world: lessons to be learnt.
Pest Management Science: formerly Pesticide Science, 64(4):360–365, 2008.
[19] Sharon Jans Ann Vandeman, Jorge Fernandez-Cornejo and Biing-Hwan Lin. Adoption of
integrated pest management in u.s. agriculture. Resources and Technology Division, Economic
Research Service, U.S. Department of Agriculture,Agriculture Information Bulletin No. 707.,
1994.
[20] Steve Elliott James J. Farrar, Matthew E. Baur. Adoption and impacts of integrated pest
management in agriculture in the western united states. Western IPM Center, 2015.
[21] Carol Lea Pilcher. Integrated pest management: an evaluation of adoption in field crop
production. 2001.
[22] Jeffrey Alwang, George Norton, and Catherine Larochelle. Obstacles to widespread diffusion
of ipm in developing countries: lessons from the field. Journal of Integrated Pest Management,
10(1):10, 2019.
[23] W Bond and AC Grundy. Non-chemical weed management in organic farming systems. Weed
research, 41(5):383–405, 2001.
[24] Rekha Raja, Thuy T Nguyen, David C Slaughter, and Steven A Fennimore. Real-time weedcrop
classification and localisation technique for robotic weed control in lettuce. Biosystems
Engineering, 192:257–274, 2020.
[25] DC Slaughter, DK Giles, and D Downey. Autonomous robotic weed control systems: A review.
Computers and electronics in agriculture, 61(1):63–78, 2008.
[26] I Sartorato, G Zanin, C Baldoin, and C De Zanche. Observations on the potential of microwaves
for weed control. Weed Research, 46(1):1–9, 2006.
[27] Ya Xiong, Yuanyue Ge, Yunlin Liang, and Simon Blackmore. Development of a prototype
robot and fast path-planning algorithm for static laser weeding. Computers and Electronics
in Agriculture, 142:494–503, 2017.
[28] J Ascard, PE Hatcher, B Melander, MK Upadhyaya, and RE Blackshaw. 10 thermal weed
control. Non-chemical weed management: principles, concepts and technology, pages 155–175,
2007.
[29] Christian Marx, Stephan Barcikowski, Michael Hustedt, Heinz Haferkamp, and Thomas Rath.
Design and application of a weed damage model for laser-based weed control. Biosystems
engineering, 113(2):148–157, 2012.
[30] Kirtan Jha, Aalap Doshi, Poojan Patel, and Manan Shah. A comprehensive review on automation
in agriculture using artificial intelligence. Artificial Intelligence in Agriculture, 2:1–12,
2019.
[31] Rohit Sharma, Sachin S Kamble, Angappa Gunasekaran, Vikas Kumar, and Anil Kumar. A
systematic literature review on machine learning applications for sustainable agriculture supply
chain performance. Computers & Operations Research, 119:104926, 2020.
[32] Craig M. Schluttenhofer Augustus Morris Deng Cao, Cadance Lowell. Undergraduate research:
Deep learning based plant classifiers and their real-life research applications. American Society
for Engineering Education (ASEE) Annual Conference, 2020.
[33] Jonathan A Jackson and Patrick A Jackson. Plant eradication using non-mutating low energy
rapid unnatural dual component illumination protocol (rudcip) in four parameters, October 28
2014. US Patent 8,872,136.
[34] Lin Wang, Qihao Song, Hongbo Zhang, Caojin Yuan, and Ting-Chung Poon. Optical scanning
fourier ptychographic microscopy. Applied Optics, 60(4):A243–A249, 2021.
[35] Binh Tran, Hongbo Zhang, and Shawn Addington. Virtual lidar: self-driving scenes classification.
In Image and Signal Processing for Remote Sensing XXVI, volume 11533, page 1153310.
International Society for Optics and Photonics, 2020.
[36] Joseph Kolly, Hongbo Zhang, and Wakee Idew. Self-driving with one rgb camera. In Laser
Science, pages JTu7D–5. Optical Society of America, 2020.
[37] Hongbo Zhang, WenJing Zhou, and Ting-Chung Poon. Instance image classification with laser.
In Frontiers in Optics, pages FW7A–2. Optical Society of America, 2020.
[38] Hongbo Zhang, Yaping Zhang, Lin Wang, Zhijuan Hu, Wenjing Zhou, Peter WM Tsang, Deng
Cao, and Ting-Chung Poon. Study of image classification accuracy with fourier ptychography.
Applied Sciences, 11(10):4500, 2021.
[39] Solvejg K Mathiassen, Thomas Bak, Svend Christensen, and Per Kudsk. The effect of laser
treatment as a weed control method. Biosystems Engineering, 95(4):497–505, 2006.
[40] NING Wang, N Zhang, Floyd E Dowell, Y Sun, and Dallas E Peterson. Design of an optical
weed sensor usingplant spectral characteristics. Transactions of the ASAE, 44(2):409, 2001.
[41] N Wang, N Zhang, J Wei, Q Stoll, and DE Peterson. A real-time, embedded, weed-detection
system for use in wheat fields. Biosystems Engineering, 98(3):276–285, 2007.
[42] Gail McConnell. Improving the penetration depth in multiphoton excitation laser scanning
microscopy. Journal of biomedical optics, 11(5):054020, 2006.
[43] James R Heitz and Kelsey R Downum. Light activated pest control. ACS Publications, 1995.
[44] Masami Shimoda and Ken-ichiro Honda. Insect reactions to light and its applications to pest
management. Applied Entomology and Zoology, 48(4):413–421, 2013.
[45] Kil-Nam Kim, Qiu-Ying Huang, and Chao-Liang Lei. Advances in insect phototaxis and
application to pest management: a review. Pest management science, 75(12):3135–3143, 2019.
Cooperators
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
Research
We highly appreciate the support from Southern SARE for this research. We have been working closely on the research. We have been working very hard on the development of the robotics platform as well as the optical source for weed removal. Overall, we have completed the design of the robotics platform prototype and the light source prototype. We have made initial tests of both platforms. Results show that the optical weed removal technique works effectively.
We have successfully validated the prototypes applied the prototypes for weed control experiments. Overall, we have been working very closely on the development of the robotics platform as well as the optical sources for the weed removal. Overall, we have completed the design of the robotics platform prototype and the light source prototype. We have made initial tests of both platforms. Results showed that the robotics platform is able to travel in farm well. It also showed that weed removal technique works well.
The first goal of the research is to build an affordable and extensible robotics platform development. For this, we have built the robotics platform. One smaller size robotics platform has been built and tested. Another bigger robotics platform is being built. The smaller size robotics platform is able to use the camera for the recognition of road conditions. GPS sensor, magnetometer sensor, and Inertial measurement unit (IMU) sensor are also used. All these sensors work together to be responsible for the robot's navigation. The robotics platform also has a customized light source installed in the middle of the platform for the removal of the weed.
The prototype only costs about 300$ to build. So it's quite affordable for farmers to use the robotics platform for a lighter workload shown in Figure 1. The bigger robotics platform being constructed is better suitable for larger-scale soybean farm weed control. It will cost about 5K to build. The bigger robotics platform will use similar technology as the smaller-size robotics platform. The major difference is the size of the robot and the power rating of the motors to drive the robot. For the smaller size robot, it uses 4 by 4 driving wheels. In contrast, the bigger robot uses 6 by 6 driving wheels. The use of more motors makes the robot able to travel on tough terrains and meanwhile carry a good amount of payload shown in Figure 1.

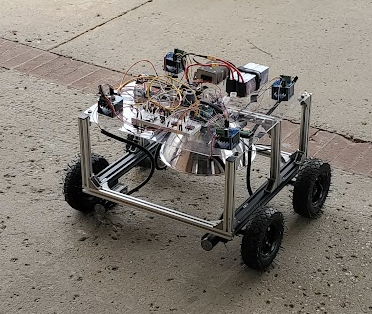
Figure 1: The robotics optical energy weed control platform
We have also built a bigger prototype robot. The robot is significantly bigger than the first prototype robot therefore it can be used on more diverse farms. We have experimented it on farm and it has been shown working well for traveling on the farms without difficulties. We have also built the software system for the robot so that it can be easily used by farmers to control the robot for the weed control shown in Figure 2.

Figure 2: The bigger robotics optical energy weed control platform
The second major goal is to develop an optical source for weed control. The optical light source development is a crucial part of the research. For this purpose, we have attempted a few different design choices. For the first generation of the light source, we have used a simple mix of UVC light and infrared light. The power of the first-generation light source however is relatively low. Due to this reason, we have increased the power significantly. Additionally, the design of the light source is also differentiated between UVC only, infrared only, and UVC + infrared mixture. Each design approach has its pros and cons, UVC has a direct impact on cell health.
The UVC spectrum of 275nm is strongly absorbed by the nucleic acids of a microorganism. and, therefore, is the most lethal range of wavelengths for microorganisms also known as the germicidal spectrum [1]. Specifically for plants, UVC light is known able to lead to damage in nucleic acids, amino acids, proteins, lipids, plant growth regulators, pigments, photosynthesis, Photosystems I and II, and structural modifications [2]. As such, UVC is chosen as the candidate for weed control. In addition to UVC light source, infrared light is known to have significant heat effects therefore able to burn the weed leaf and stem for effective weed control. While the mechanisms of infrared light are different from UVC, they work together to achieve effective weed control.
The first-generation weed control involves the use of both UVC and infrared light for weed control shown in Figure 3.
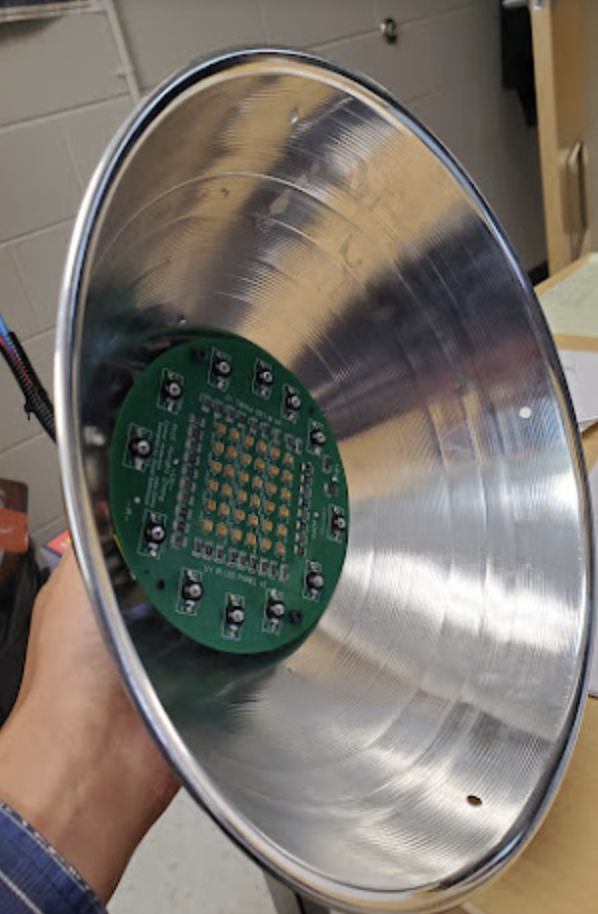
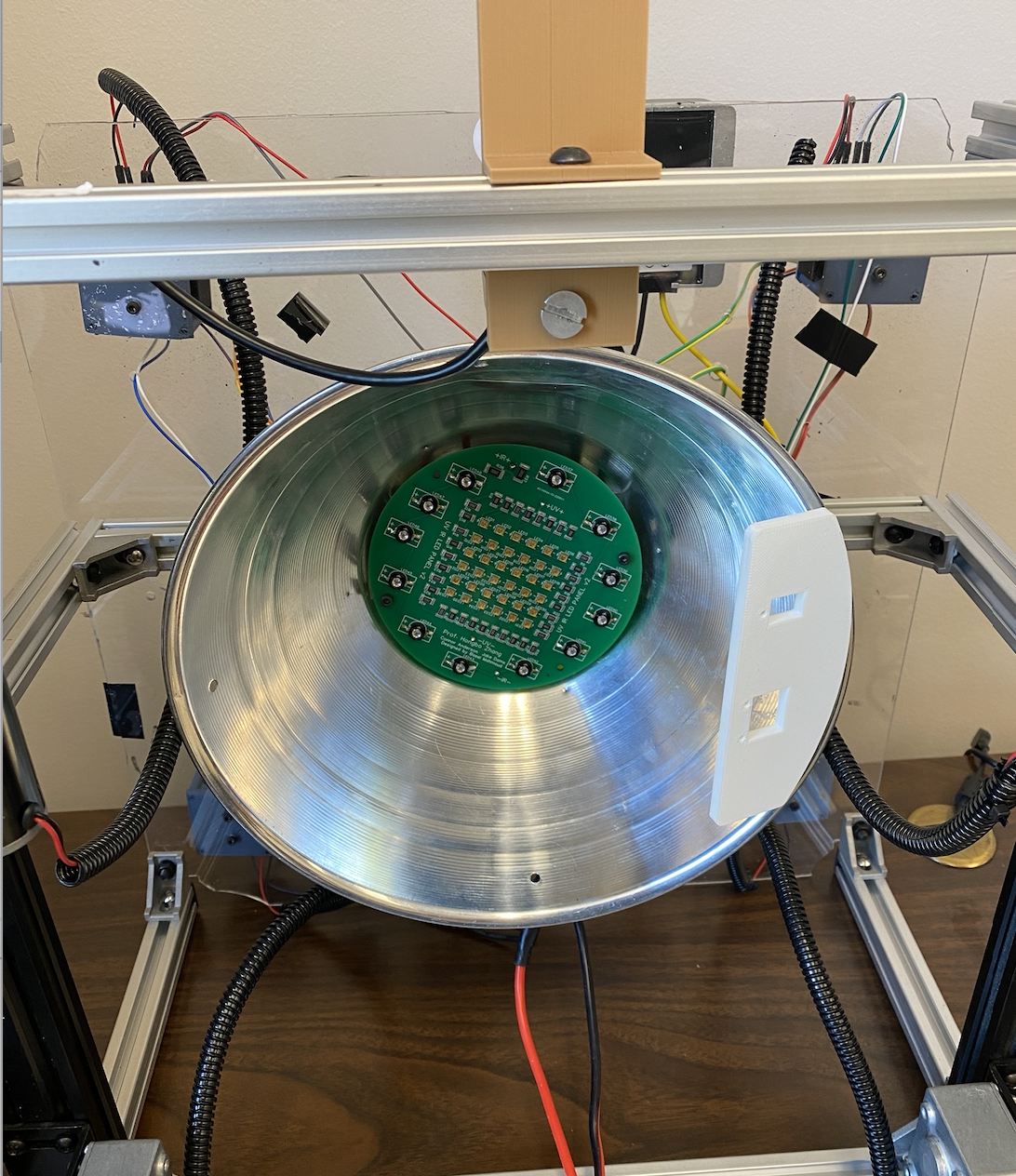
Figure 3: The customized made optical source
The second-generation UVC, infrared, UVC + infrared PCB boards shown in Figure 4. As shown in Figure 4, the left is the UVC + Infrared light source.
The right is the infrared optical source. Different from the first-generation optical source, the second-generation optical source used a Zener diode and fuse to protect the circuit from overheating.

Figure 4: The second-generation customized made optical source.
On the other hand, the laser light source represents another significant effort that we have been able to make to produce effective weed control optical source. Specifically, we have adopted the use of the two 450nm, 60W lasers. Specifically, we have used two such 60W lasers in making the laser-based weed control optical source. The two lasers work together to achieve the laser steering in a coherent manner. Mirror-based laser steering system was used to steer the laser and control the weed. The laser steering relies on the calibration of the lasers which is shown in Figure 5.
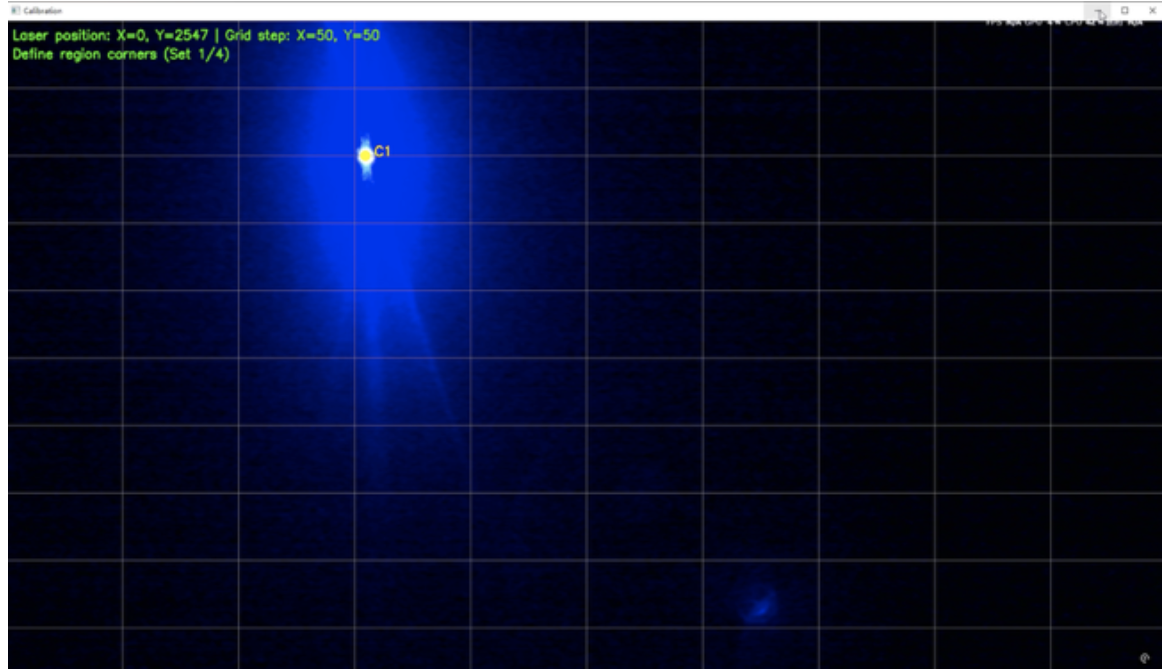
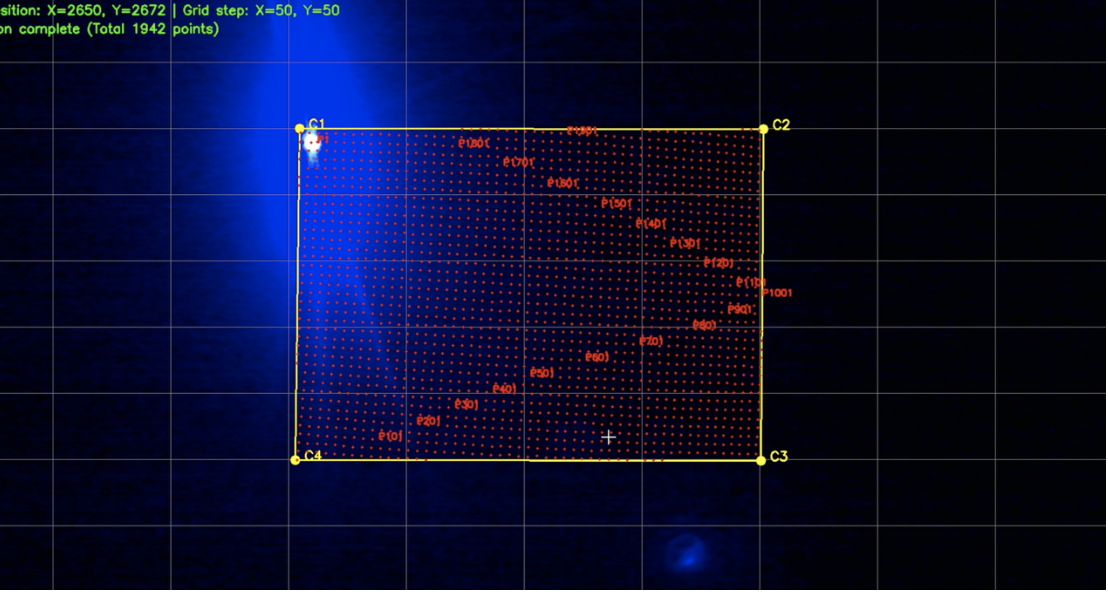
Figure 5: Laser calibration interface. It is evident that there are projected laser dots (deep blue) are being calibrated through the use of the projected laser dots on the ground with dense red dots for calibration purposes.
We have implemented a few different laser calibration methods to achieve the best accuracy of the laser calibration. Specifically, we have implemented three different methods for the calibration. It includes the homography calibration, Neighbor Neighbor, K-Nearest Neighbor neighbor. Among them, K-K-nearest neighbor was found as the most reliable calibriation method. Through our research, we involved the use of dual laser system. For both lasers, we have performed careful calibration to ensure their position control accuracy able to meet the needs of the system accuracy for weed control. The dual laser system steering was controlled through the use of the computer controlled galvanometer systems to steer the laser to the targeted positions.
The third major goal is to develop the weed detection method so that the robotics platform is able to automatically remove the weed with high precision. For this purpose, we have developed the weed detection pipeline so that farmers will use the pipeline for processing the images taken from camera to automatically recognize the weeds. Specifically, through the process, it involves the detection of the weed using deep learning methods. We have used Yolo model, SSD Mobilenet V2, and Faster RCNN for the detection of the weed. The detection results are shown in below. It is evident that the faster RCNN weed detection accuracy is the highest. However, the RCNN weed detection speed is slower than the Yolo method. As such, we have chosen the use of Yolo model for the implementation of the weed detector shown in FIgure 6.
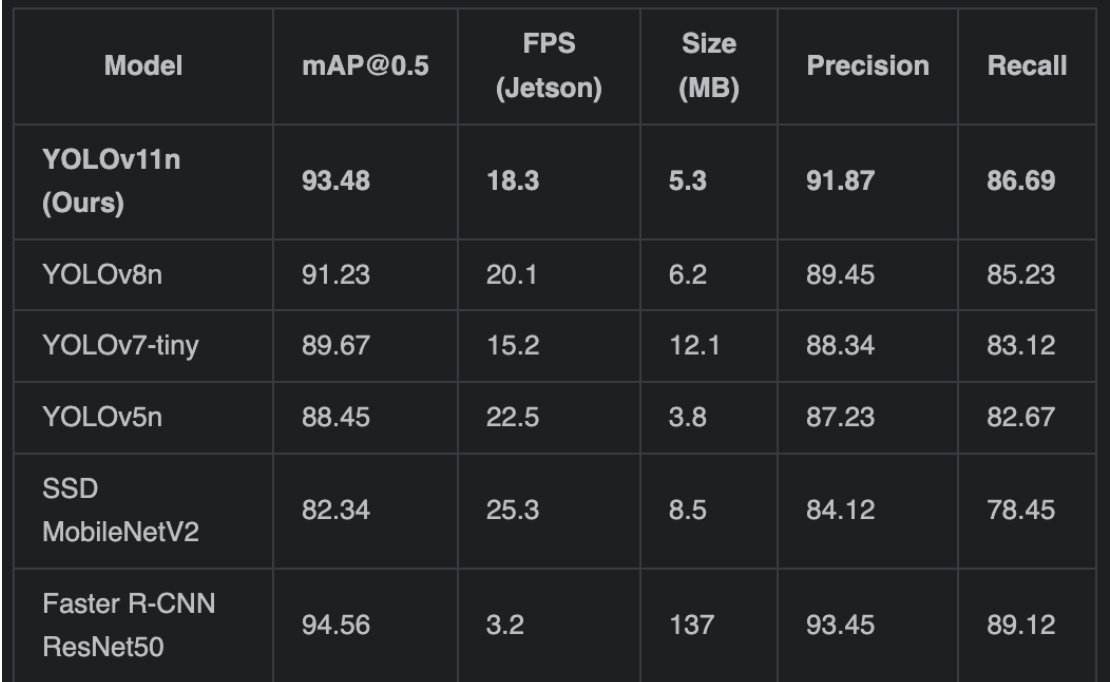
Figure 6: Weed detection accuracy for different deep learning computer vision models.
We have also compared with inference speed of the Yolo model when considering the pre-processing (data augmentation), Yolo inference, and data post-processing. The comparision of them is shown in below. Overall, the yolo took about 54ms to run the inference on the regular industry PC computer shown in Figure 7.
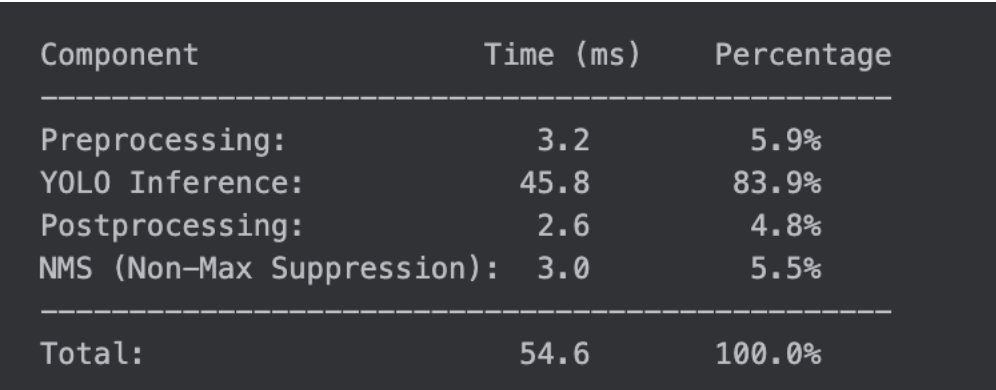
Figure 7: Weed detection speed considering data pre-processing and post-processing and Yolo inference.
We have also compared with inference speed of the Yolo model on different computing platforms including Jetson Nano (TRT), Jetson Nano (Pytorch), Desktop RTX 3080. The comparison of them is shown in below illurstrating that Jetson Nano is the slowest (12 - 18 FPS) but acceptable for weed control. We have been able to use tensorRT on Jetson Nano for sucessful weed detection shown in Figure 8.
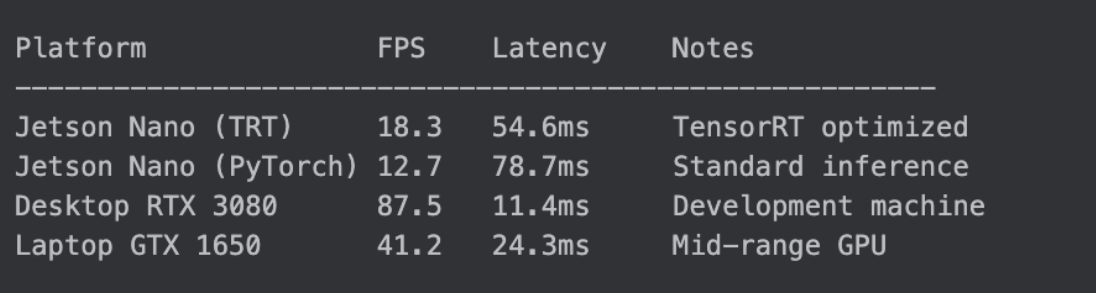
Figure 8: Weed detection inference speed on different computing platforms.
We have also compared the lighting conditions and how it impacts the recognition precision. Based on different lighting conditions, the precision for recognition of weed is shown in Figure 9. It shows that the model is still strong with different lighting conditons.
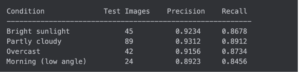
Figure 9: The weed detection accuacy given different lighting conditions.
We also experimented the use of quantization of the model for determining the best performance model for weed detection. Specifically, we have compared the Pytorch, TensorRT, and ONNX. These models were run on the Jerson Nano platform. It was found that the tensorRT (FP16) is among the most efficient model quantization methods able to run the weed detection Yolo model.
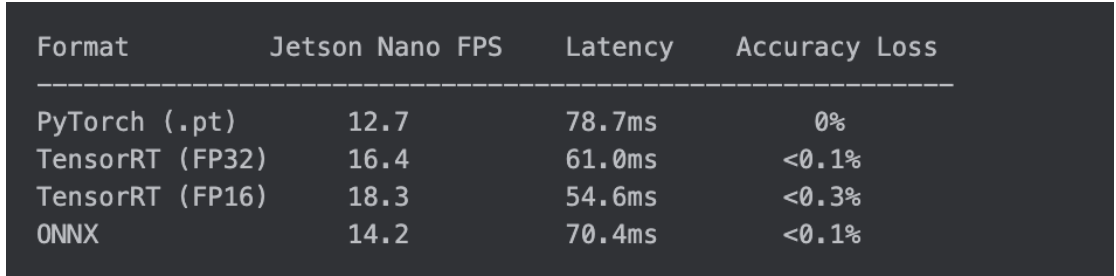
Figure 10: The weed detection latency and accuacy given different model quantization techniques.
Summary: Overall, the hardware design is sucessful. In the early phase of the project, we have designed a simple robotics platform prototype primiarly using LED to control weed. Consequently, we have achieved the design of the lower-cost laser weed control robot costing about $5,000. While the cost of the robot is low, it is proven that the dual laser design approach is able to enable effective weed control.
The evaluation of the robotics platform has been conducted on both MTSU campus and MTSU research farm. The evaluation of the robotics platform on campus includes driving on concrete and grassland conditions. The results of the evaluation on MTSU campus showed that the robot is able to perform smooth and efficient navigation.
Phase 1 Results
1. On Campus Evaluation
In this task, the robot shows that it is able to navigate on the concrete ground.
We also test the robot for its capability to drive and navigate on the grassland.
Furthermore, we test the robot for its capability to climb the hill of the grassland.
We have also tested the UVC light control. Evidently, you can find that the UVC light is turned on and off intermittently and remotely successfully.
https://youtube.com/shorts/FCpRB2ORiqw?feature=share
2. MTSU Research Farm Evaluation
We have also performed various tests of the robotics platform at MTSU research farm. The following tests were performed on the MTSU research farm. It mainly includes off-road tests of the robot on different terrain conditions to ensure the robot is able to travel on the different terrain easily without too many difficulties.
Fam grassland: The research plot grassland navigation test A
Fam grassland: The research plot grassland navigation test B
https://youtube.com/shorts/maHs3RslP2o?feature=share
Fam plot: The research plot navigation test A
https://www.youtube.com/shorts/SqnsHk0BXaU
Farm Plot: The research plot navigation test B
https://www.youtube.com/shorts/KvQ2ez9BCEA
Farm Plot: Travel between the dirt and the grassland
https://photos.app.goo.gl/BGVC8WXHfy62crnz8
3. Optical Directed Energy Source Evaluation
The effectiveness of optical directed energy on weed control has also been evaluated. For this, we have built an indoor growth chamber to make the evaluation more accurately and efficiently conducted.
https://photos.app.goo.gl/oi8mHwu1bkPpqswA9
The evaluation is still in progress, but the early results are promising. Our study is divided into a few groups according to e.g
5, 10, and 15 seconds. We radiated both soybean and weed. Studies showed that UVC has a clear impact on the weed and soybean. Importantly, we show that the effects of radiation is very localized as shown in Figure 4. It means that we can precisely control where to deliver the radiation. As shown in Figure 4, the UVC-radiated soybean leaf died 3 days after radiation. However, the effects are quite localized and other leaves are not damaged at all. As such, it does not affect the overall soybean health.
In practice, we will target the smaller size weed, as such, we can ensure sufficient coverage of the weed by UVC source to ensure the control of the weed. Meanwhile, the UVC source will not affect the soybean plant health thus ensuring the yield of soybean. We will update more outcomes of our research in the next report.


Figure 4: The indoor experiment of using UVC to radiate soybean and weed. Left: The growth chamber, Middle: the experiment chamber, Right: The middle of the soybean leaf died due to UVC radiation, but the surrounding leaves are intact.
Phase 2 Results
1. Laser weed control robot evaluation. We have evaluated the laser weed control robot near campus. The evaluation has yielded an excellent performance in traveling the near campus terrians shown in Figure 5.

Figure 5: The robot field test near campus of Middle Tennesse State University
We have also performed the evaluation of the laser weed control robot at Middle Tennnesee State University farm shown in Figure 6.

Figure 6: The robot field test on the Middle Tennesse State University Farm
We have also performed the evaluation of the laser weed control robot at Lazy L farm shown in Figure 7.

Figure 7: The robot field test t on the Layz L Farm
2. Laser weed robot evaluation. We have performed evaliation of the laser control performance. The results are shown in Figures below.

Figure 8: The burning of the weed with the use of the laser weed control robot
The weed detection results are shown in Figure 9. Similarly, the visualization of the weed control process is also shown in Figure 9.






Figure 9: Top: Weed detection visulization, Bottom: The burning of the weed due to the laser weed control robot.
The effects of laser weed control and its impacts on the weed have been shown in Figure 10. We have test from 1 to 60 seconds for the use of laser to control weed. It is evident that the laser is quite effective for compromise the health of the weed as shown in the Figure 10.
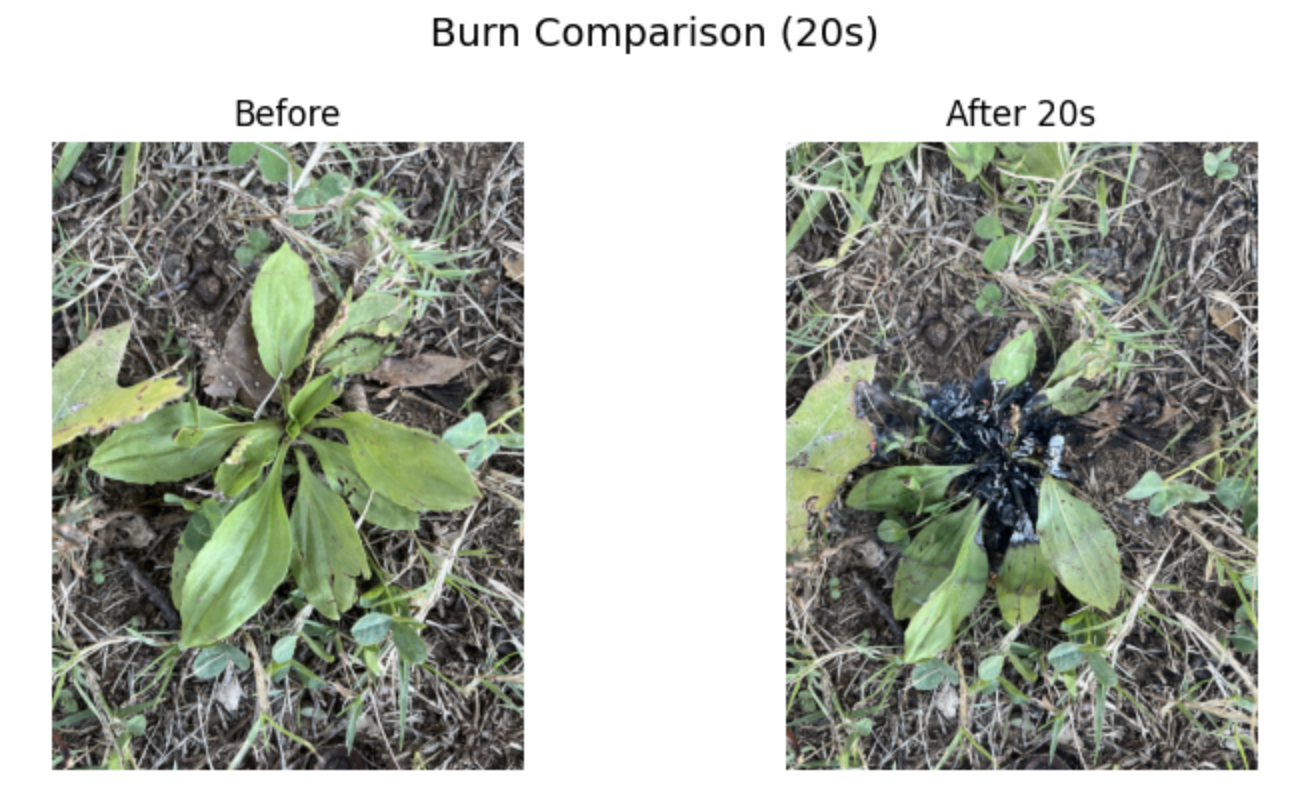

Figure 10: The effectiveness of burning of the weed due to the laser weed control robot.
Students Engagment in this research
We have been engaging more than 15 undergraduate students and 1 graduate student through this research. Students play significant roles in producing the research product of the project. They are part of the educational impacts of the research. We want to acknowledge their contribution to this research. This research has greatly impacted their lives and future careers. We worked hard together. We went to field trips together. We worked very hard for this project to make it impactful.
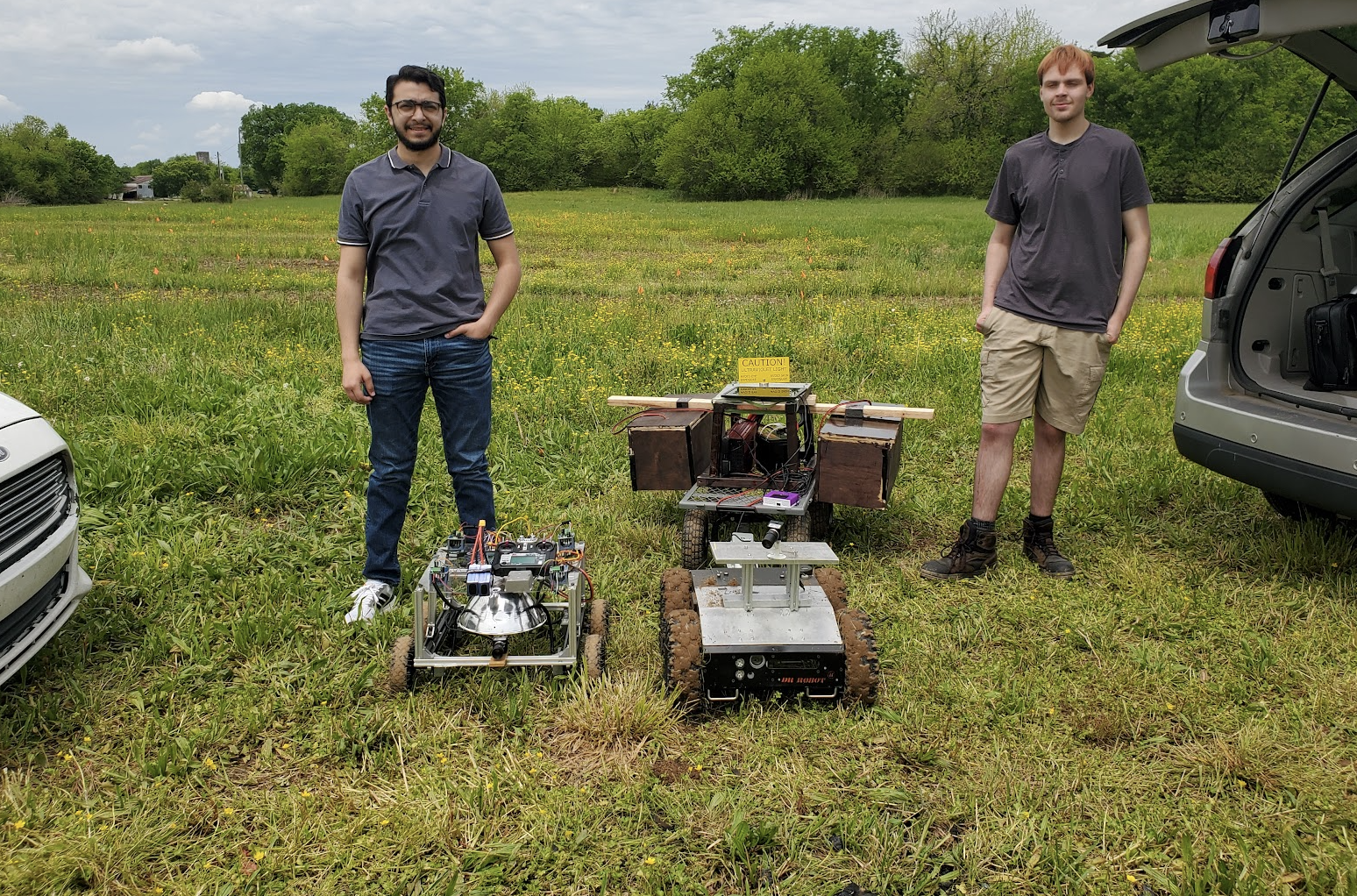
Figure 11: Student's engagement with the work in 2023
Ibrahim and Justice are on the farm with ohase 1 robots. The right robot is able to tow about 100 pounds, which will be good robotics platform to be used on farmer's land for the next stage of our project.

Figure 12: Justice is working on manufacturing parts for the robot in 2023

Figure 13: Students prepare for the field test of the phase 2 laser weed control robot in 2025
Summary: The results showed that the laser weed control robot is able to effectively control weeds. The robot is able to travel on different terrians without difficulties benefiting from it powerful motor and wheels. The dual laser design while is not very high power due to the constraints of the budget, it is able to control the weed effectively. Overall, our research results conclude that design of lower-cost laser weed control robot is feasible and practical. Most importantly, the lower-cost laser weed control robot has been welcomed by farmer.
Special Note: This research has been highlited by North Central IPM Center
https://www.youtube.com/watch?v=uDrJEoKD1sg&feature=youtu.be
References
[1] T. Dai, M. S. Vrahas, C. K. Murray, M. R. Hamblin, Ultraviolet c irradiation: an
alternative antimicrobial approach to localized infections?, Expert review of anti-infective
therapy 10 (2012) 185–195.
[2] F. HollÅLosy, Effects of ultraviolet radiation on plant cells, Micron 33 (2002) 179–197.
Educational & Outreach Activities
Participation summary:
We have published one Journal article. We have published related confernce papers. We are still in the process of preparing another Journal article. PI has presented the research to larger community: North Central IPM Center. Many (more than 50) farmers and practioners have participated the presentation.
Learning Outcomes
How to use non-chemical laser weed control method
Reduce the use of hercide to benefit crops and environment
Become interested in robotics technology
Project Outcomes
The major outcomes of the project
(1) Made an optical source
(2) Built a robotics platform
(3) Built indoor growing environment
(4) Conducted outdoor robotics navigation tests
(5) Conducted indoor UVC weed control experiments.
(6) We have sucessfully built a laser weed control robot.
(7) Lazy L strawberry farm is interested in this robot. Other farmers are also interested in this robot.
We are still outreaching more farmers to broaden the imapcts of the research.
Get more students involved will be helpful to speed up the project to make it farm ready.