Project Overview
Commodities
Practices
Proposal abstract:
In the proposed research, a low-cost smart sensing and robotics irrigation management solution is proposed. The solution is very flexible to be adopted from small to large strawberry farms. The solution is also precise and reliable using novel sensing and automation technology. The smart and integrated smart moisture sensors and robotics platforms are able to provide a cost effective and integrated solution for diversified strawberry farms to manage irrigation effectively with a limited investment. It will save an extensive amount of labor to manage the irrigation for the maximum yield of the strawberry.
Objective 1: The first objective is to develop a low-cost, extendable, and integrated solution consisting of wireless soil moisture sensors, robot, and farmer friendly smartphone app to manage the irrigation of strawberry farms. The low-cost distributed wireless sensors (less than 20 USD per sensor) are able to measure the soil temperature and transfer the soil moisture up to 600 feet distance. Such long distance communication ensures the least number of sensors to cover the strawberry field. PI has successfully developed the prototypes of the sensors showing the feasibility of developing the low-cost and long-range wireless soil moisture sensors shown in the Figure below. 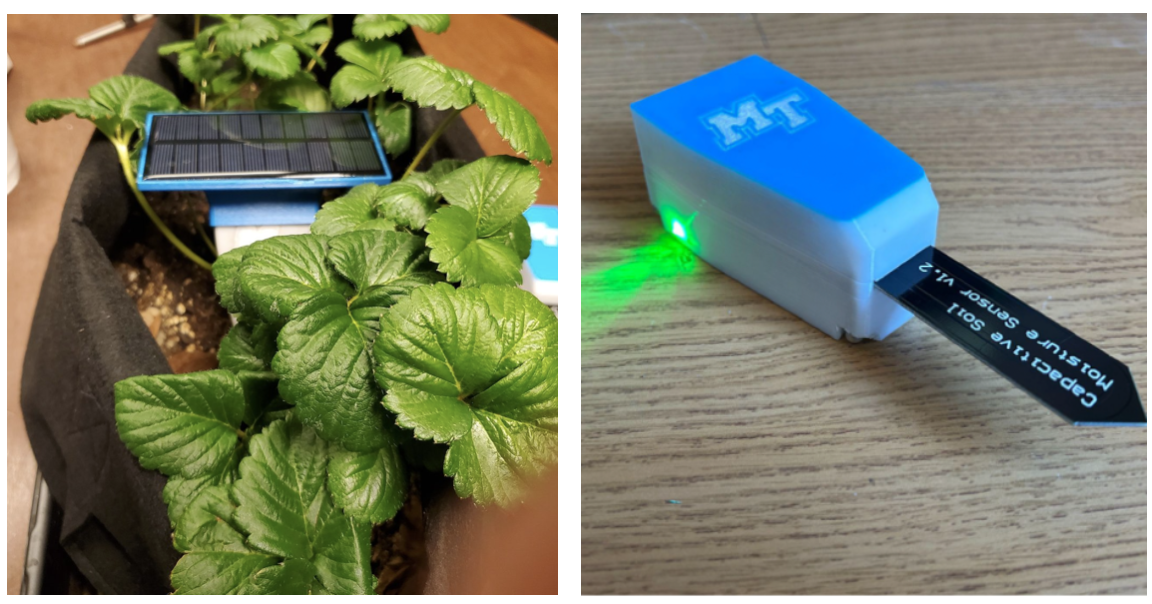
Figure 1: The preliminary wireless soil moisture sensor with a solar panel.
Through this research, we will further improve the sensor reliability to calibrate the sensor with different types of soils. Meanwhile, we will enable the wireless moisture sensors to send data to both farmers, pumps, and the irrigation robot. Through this, farmers can read the data on smartphone. The wireless sensor can control the water pump remotely for small size of strawberry farms. The wireless sensors are also co-work with robot, where robot can control the water pump for large size of strawberry farms. We have developed the preliminary prototype of the robot shown in the Figure below.

Figure 2: The preliminary robot prototype able to travel on different terrains.
With only wireless soil moisture sensors, we will be able to sense soil moisture in distributed locations of the field, it is however insufficient to sense the water stress level of each individual strawberry plant. To fill this gap, we will develop a novel contactless computer vision driven plant water stress monitoring sensor. PI has successfully developed contactless computer vision technology to monitor soil moisture level [13, 14]. Water stressed plants exhibit different laser absorption capability from the well-watered plants [15, 16, 17]. Through this research, we will mature our computer vision technology to measure the strawberry plant water stress by shining a small and inexpensive diode laser on the strawberry plant leaf to measure the water stress level of the strawberry plants shown in the Figure below.

Figure 3: The contactless laser sensor to sense the water stress of plant. Left: laser reflection from healthy strawberry, Right: laser reflection from water stressed plant. The laser reflection on the water stressed plant shows more white color spectrum.
The water stress will be used together with wireless moisture sensors to determine the optimal irrigation policy. The water stress monitoring sensor can be used by farmers through a handheld approach or mounted on the robot. It therefore can be used by small to large strawberry farms. The water stress sensors will not only help to determine the optimal irrigation policy but also useful to detect the leakage and blockage of drip lines since it is able to determine the water stress of each strawberry plant.
The low-cost robot is expected to be affordable for beginning and socially disadvantaged strawberry farmers. The low-cost robot (less than 5K USD) will be able to travel in the strawberry field to survey the large size of strawberry farm to ensure the accurate soil moisture reading. PI has developed the preliminary prototype of the robot and proved the feasibility of the low-cost robot. The robot is able to travel the field using GPS and a single camera, thus low-cost, computer vision technology to avoid obstacles and farmers to ensure a smooth and efficient travel between the rows of the strawberry field [18, 19, 20, 21].
Objective 2: The second objective is to optimize irrigation policy using the sensors and robot on the MTSU research farm both indoor and outdoor. For the indoor farm, we will calibrate and test the wireless moisture sensors and plant water stress monitoring sensor in the indoor strawberry growing facility developed by PI. At the outdoor MTSU research farm, we will cultivate 8 rows of plasticulture strawberries with three feet between rows and 1.5 feet between plants. Each row is 30 feet long. We will separate 8 rows into different zones with clear separation markers between zones so that we can experiment different irrigation policies on these zones to achieve the optimal irrigation policy.
The optimization of the irrigation policy includes the best combinations of irrigation flow rate, duration, timing, and frequency. The choice of these parameters will depend on multiple parameters including soil types, health of strawberry, and the yield of the strawberry. Both soil moisture levels measured by wireless moisture meters and the plant water stress will be used through the process to determine the optimal irrigation to ensure the use of the least amount of water for healthy and maximum strawberry yield. The optimization of irrigation duration and frequency will be taken using an iterated process to achieve the optimal irrigation policy.
Objective 3: The third objective is to conduct on farm research on the Moss Hill Mellons Farm. The farm has been cultivating and commercializing strawberries successfully. However, the farm only uses the conventional irrigation method. Farm’s owner uses the thumb of rule of about one inch per week for irrigation. Upon rainy days, the temporary pause will be used to guide the irrigation. During a typical growing season, over irrigation or lack of irrigation often occurs, which leads to root rot, fruit rot, or small or lower quality fruit. As such, a smart irrigation approach is needed to reduce the labor meanwhile to increase the farm’s income.
Project objectives from proposal:
Objective 1: The smart irrigation management solution will feature novel and user friendly long range wireless soil moisture sensors, the contactless plant water stress monitoring sensor, and the low-cost robot. Wireless moisture sensors will be developed using reliable capacitance moisture sensing technology with the long-range ESP-now wireless communication protocol [22]. A smartphone app will be used to monitor the health level of the battery of the wireless moisture sensor and the interaction of the sensor with the irrigation robot. Through doing this, it will offer an excellent usability for farmers to gain confidence in using the system.
A novel and low-cost strawberry plant water stress monitoring sensor will be developed using eye-safe laser soil surface reflection to measure the plant water stress level. The entire setup is also miniature due to the use of only one diode laser and a camera. It is expected that the contactless water stress monitoring setup will be installed on the robot. Once the robot travels in the field, the laser will continue to shine on the plant and the camera will image the reflective laser beams to analyze the water stress level using real time and single image object recognition computer vision methods [13, 14]. Farmers can use the sensor in a handheld fashion. For this condition, the data processing will be conducted on the smartphone of farmers. The sensor can also be mounted on a robot, for this condition, the image processing will be conducted with the Nvidia Jetson Nano computer inside the robot to achieve lower power and real-time smart sensing of the water stress of the individual strawberry plant. The irrigation robot will communicate with wireless sensors using the ESP-Now protocol. It will also control the water pump using ESP-Now protocol. The plant water stress monitoring sensor to be installed on the robot to sense the plant water stress. The sensor will help the robot to monitor the leakage and blockage and subsequently controlling the irrigation controller. The water leakage will be inferred through the soil moisture and irrigation frequency data using the root cause analysis model [23]. If the soil moisture or plant water stress level of a particular region is significantly different from the neighboring regions, the region becomes highly likely associated with water leakage. For inferring multiple leakage locations on a specific spot, multiple different levels of soil moisture and plant water stress will be used for such process [23]. Through the similar process, the clogged drip tape and emitter locations will be inferred through the largely reduced soil moisture and significantly higher plant water stress level in comparison with the neighboring region [24, 25].
The sensors and robotics platform developed through the research is expected to function as a standalone system without requiring external electricity infrastructures. It means that the wireless sensors will use a solar panel mounted on the sensor to charge the battery inside the sensor. The sensor will go to the sleep mode to save power after data transmission. We will optimize the sensor data transfer rate and frequency to ensure the power saving to ensure the battery able to keep running even if the weather has no good sunshine for a few days. Similarly, we will have a solar panel charging station on farm to charge the battery of the robot to ensure an excellent and sustained robotics operation.
Objective 2: The optimal irrigation policy will achieve the max plant health and yield with the minimum amount of irrigated water. The soil moisture will be continuously measured to justify the increase or decrease of water to minimize the water usage. The amount of water irrigated will be started from the low dose and only increased as needed depending on requirement of the water usage. The plant water stress and soil moisture will be used as the guiding principle to justify the increase or decrease of the irrigation quantity. A good soil moisture level will need to maintain the plant vigor, health of flowering and fruit, and the yield of the strawberries. The optimal resource allocation model, able to scientifically optimize a multivariable system, will be developed to determine the optimal irrigation policy [26]. The ARIMA model able to predicate the strawberry plant health and fruit yield based on soil moisture will be developed as one part of the optimal irrigation policy [27].
Objective 3: We will collaborate with the Moss Hill Mellons Farm to allow the farm to conduct smart irrigation with robot for their strawberry. For this purpose, the robot will be made ready for them to use on their farms. It is expected that the smart irrigation system will enable them to perform irrigation easily without the need of modification of the infrastructure of their strawberry farms. The on-farm research will start from the strawberry planting season and expected to complete after the fruit season. The optimal irrigation policy will use the similar optimal irrigation policy formed through our Lab control and MTSU research farm studies. Due to the differences of the soil types and landscape structure, it is expected that a slight modification of the irrigation duration and frequency will be performed. The loss of the fruit and yield conditions will be quantified to conclude the effectiveness of the on farm smart irrigation research. Qualitative feedback will be used to obtain the farmer’s perception and comments on the smart irrigation robot to further improve it.