Final report for GNE19-225
Project Information
The primary goal of the study was to develop a robotic manipulator system including a pruning end-effector and a robotic manipulator and develop path planning algorithms to reach targeted pruning branches in a collision-free manner. A branch pruning dynamic analysis was performed to measure the cutting torque requirements for different apple cultivars. The effect on cutting torque requirements was also investigated on branch cutting angle and branch-blade contact point. The results indicated that the Gala trees have the highest torque requirement whereas the lowest torque requirement was observed for Honeycrisp. The results also suggested that the branch-blade contact point significantly affects the torque required for cutting branches of Fuji apple trees. Furthermore, the results also implied that the cutting angle insignificantly affects the torque required for pruning branches of Fuji apple trees. Based on the dynamic analysis, a concept design of two-revolute (2R) degrees of freedom (DoF) pruning end-effector was developed. The cutter mechanism was developed using a pneumatic cylinder to perform the pruning cut. The field test results indicated that the end-effector had a spherical workspace with a diameter of 26 cm, and the cutter can be aligned to a wide range of orientations to cut up to 12 mm diameter branches of Fuji apple trees. In the next stage, an integrated six DoF (6 DoF) robotic manipulation system was developed, including a 3R DoF shear pruner end-effector and a three-prismatic (3P) DoF cartesian positioning system. A series of robot performance indices were developed, and the results indicated that the integrated end-effector had superior kinematic dexterity, and manipulability compared to the 2R DoF end-effector. The field test results indicated that the end-effector was able to cut the branches up to 25 mm diameter; thus, could be adopted for pruning modern apple trees with frequent branch renewal architecture. Finally, collision-free path planning algorithms were developed to reach the targeted cut points on selected branches. Three different path planning algorithms were developed including Rapidly-exploring Random Tree (RRT), path smoothing, and optimizing algorithms. A 3D model of the apple tree was developed using the LiDAR point cloud data, by segmenting the tree trunk and the primary branches. To improve the performance of the algorithms, different approaching poses of the manipulator at target branches were also added. Two different simulation environments were established to create collision-free paths for different robotic systems including a 6R DoF and a 3R3P DoF robotic manipulator. The results indicated that the mean path finding time for a 6R DoF and 3R3P DoF manipulator was recorded as 19 s and 14 s, respectively. The inclusion of alternate approaching poses functionality improved path finding success.
The primary goal of this project is the development of a robotic manipulator system for apple tree pruning. The project will be focused on the following objectives:
- Development of pruning end-effector: The end effector will be developed by considering the maneuvering capabilities to cut the branches of all orientations and minimum spatial requirements to freely move in a limited workspace. The field test for pruning force measurement will be conducted which is essential for the selection of the end effector components. The design validation and workspace analysis of the end effector will also be performed.
- Development of an integrated robotic manipulator for apple tree pruning: A three rotational (3R) degrees of freedom (DoF) electric shear cutter end effector will be developed. A cartesian manipulator (3P) will be developed. The end-effector will be integrated with cartesian system to develop a 6 DoF (3R3P) robotic pruning system. The simulations will be performed for the robot workspace analysis, kinematic dexterity, manipulability, and velocity ellipsoids. A microcontroller operated electronic controller will be developed for validation. Field tests will be performed to validate the design parameters and simulation results.
- Collison-free path planning framework for branch accessibility: A simulation environment will be developed for automatic path planning of the robotic pruner. A series of simulations of the integrated systems (6R and 3R3P) in a virtual environment will be performed to determine the spatial requirements and branch accessibility. Obstacle avoidance algorithms will be developed to establish a collision-free trajectory for the end effector to reach the target position. A sensing system will be developed for 3D reconstruction of the real-world tree for the validation of the simulated collision-free paths.
The long-term goal of this project is to reduce the dependence of human labor for apple production, thus, to increase the competitiveness and sustainability of the United States tree fruit industry. This project is the first step towards developing a robotic pruning system for apple trees. The outcomes of this project will provide guideline information for a fully automated pruning system.
Tree fruit industry is an important sector for U.S agriculture. Apple is an important constituent of the U.S. tree fruit industry, contributing approximately $2.75 billion to the economy, however, the production operations are still primarily dependent on human labor. In the U.S., agriculture is dependent on migrant workers but, in the past few years, the average number of hired farm workers has declined. At farms, the labor force is required almost throughout the year to perform various orchard operations such as pruning, and harvesting. These manually performed operations are labor-intensive and have high associated costs. The labor account for about 56% of the total variable costs for producing apples. Meanwhile, the limited availability of farm labor is becoming an issue for the growers, especially for time-sensitive operations. The tree fruit industry will be facing a crisis due to the issues of labor availability and associated high costs. It would be very important to have an alternative method/solution for the pruning task to reduce human labor dependency. Automation/robotics is the potential solution, but majority of the research on tree fruits robotics is focused on harvesting and thinning operations, and pruning has attracted less attention from the researchers due to the complexity of the operation.
Pruning is an important operation to maintain the fruit quality and also improves pest and disease control. Traditionally, pruning of apple trees is performed manually; but the operation is labor-intensive, costly, and the pruning decision varies from person-to-person, based on the skills and experience of the individual worker. Pruning account for about 20% of the total labor cost for producing apples. Studies reported that it requires about 30 to 35 hours of skilled labor per acre for pruning apple trees. Robotic pruning could address the issues of labor shortages and high associated costs and make uniform pruning decisions. This proposed study focuses on the investigation of some key components/technologies for automated pruning system for apple trees. The successful completion of this project will help to develop an automated pruning system for apple trees.
Cooperators
- (Researcher)
- (Researcher)
- (Researcher)
- (Researcher)
Research
Objective #1: Development of an End-effector for Robotic Pruning
1. Dynamic Analysis for Branch Pruning
The amount of force required for cutting branches is an important parameter for the pruning end-effector design. A branch pruning dynamic analysis was performed to measure the cutting torque requirements for different apple cultivars (Golden Delicious, Gala, Fuji, and Honeycrisp). The effect on cutting torque requirements was also investigated on branch cutting angle and branch-blade contact point. To measure the branch cutting torque, a force measuring sensor was integrated with a manual shear pruner (Figure 1). The cutting torque was calculated using the measured force and the length of the pruner arm. In the test, 630 cuts were made with different diameters. The maximum force for each cut was recorded, as well as the corresponding branch diameter. An Inertial Measurement Unit (IMU) was also used to monitor the angle of shear blades with the branch.
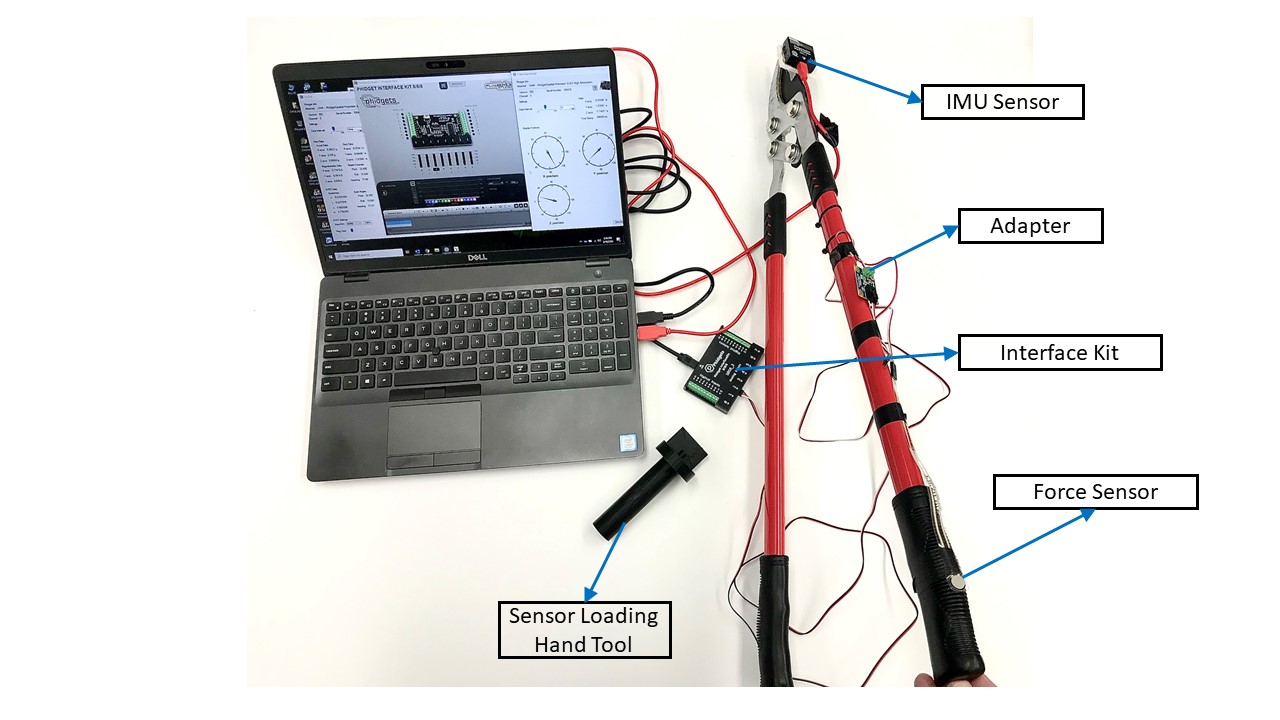
Figure 1. Manual pruner equipped with a force sensor for pruning force measurement
2. Pneumatic End-effector Development
A concept design of a robotic pruning end-effector was developed in SolidWorks environment (Figure 2). Considering the needed maneuverability of the end-effector, the concept design includes two rotational joints and a cutter which consists of a cutting blade and an anvil. The cutting mechanism was operated using the pneumatic system. The simulation was also conducted in Matlab software for workspace analysis of the end-effector, as well as the capability of aligning with the branches at different orientations.
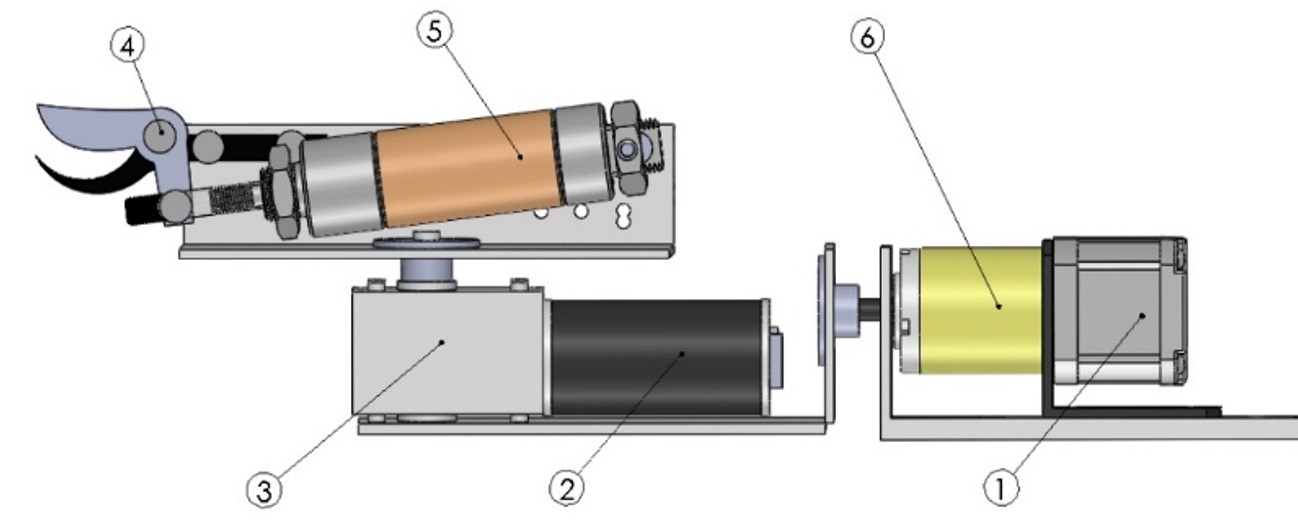
Figure 2. A two DoF robotic pruning end-effector. 1, 2- Motor, 3, 6- Gearbox, 4- Cutter, 5- Pneumatic cylinder
3. Experiment of the Integrated Pneumatic End-effector
The field test for the validation of simulation results and performance assessment of the end-effector was conducted on tall spindle ‘Fuji’ apple trees at Penn State Fruit Research and Extension Center (FREC, Biglerville, Pennsylvania). Five ‘Fuji’ trees were selected randomly, and 15 to 20 branches of different orientations were selected from each tree for tests (Figure 3). The pressure of the pneumatic cylinder was set at 0.8-0.825 MPa. In test one, the pneumatic cylinder with a bore size of 2.2 cm was used. In total, 100 cuts were tested as multiple cuts were applied to each selected branch at different locations and diameters. In test two, the pneumatic cylinder with a bore size of 2.54 cm was used to provide a larger cutting force. A similar test was conducted on randomly selected trees and 120 cuts were tested including multiple cuts to each selected branch at different diameters and orientations on selected branches.

Figure 3. The developed robotic end-effector integrated with the three directional linear actuators
Objective #2: Development of An Integrated Manipulator System
1. Three Degrees of Freedom Pruning End-effector
The end-effector was designed with an intrinsic three-rotational (3R) degrees of freedom (DoF) configuration (Figure 4). A computer-aided design (CAD) software, named SolidWorks, was used as a design tool. One of the primary objectives of the work was to minimize the spatial requirements of the robot during maneuvering in the tree canopy. The design criteria including manipulability, mechanical strength, and spatial requirements were satisfied using the Motion Simulation Toolbox in SolidWorks. An electric shear blade cutter was developed and attached to the last joint of the end-effector. To avoid joint collisions, the position/placement of the joints and shear cutter were selected based on the motion simulation results.
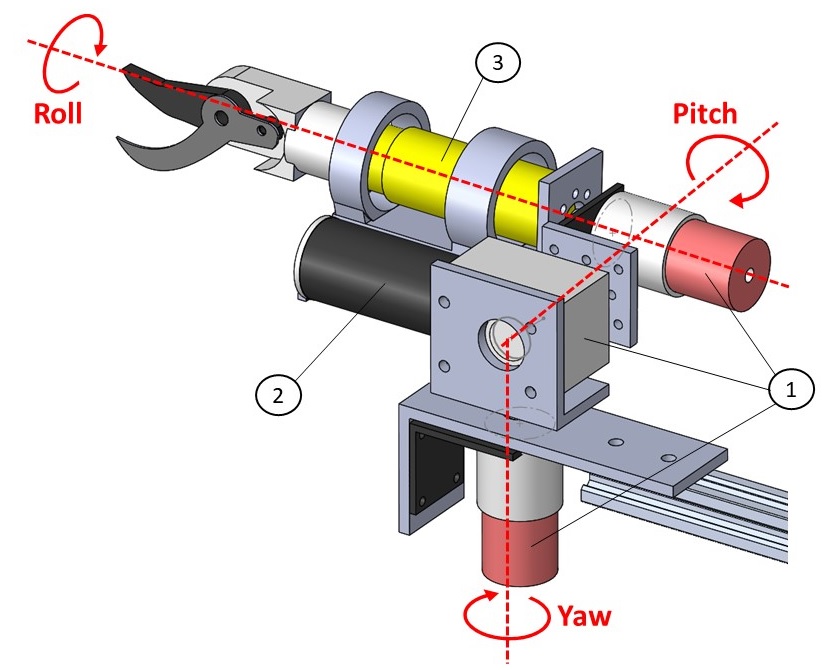
Figure 4. Concept design of the end-effector. (components: 1. Motor for yaw rotation; 2. Motor for pitch rotation; 3. Motor for roll rotation; 4. Self-locking worm gearbox; 5. Shear cutter)
2. Integrated Pruning Manipulator
A three-prismatic (3P) DoF cartesian manipulator was designed in SolidWorks for the integration of the 3P DoF end-effector. A rigid linear arm was designed to integrate both systems to develop an integrated 6 DoF robotic pruning system (Figure 5). SolidWorks motion simulation toolbox was used to validate the design for joint collision and assess the performance of the system.
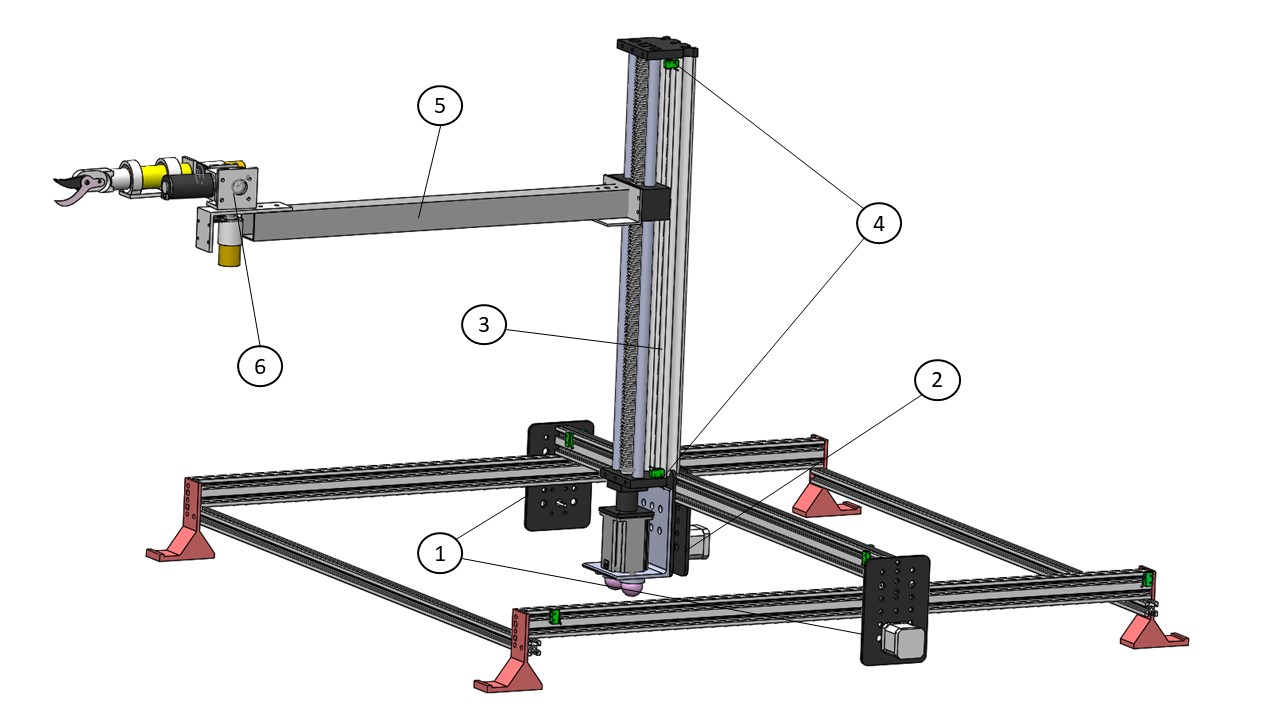
Figure 5. Integrated pruning system with an end-effector attached to a cartesian manipulator; the components include: 1) x-axis rails; 2) y-axis rail; 3) z-axis linear actuator; 4) axis limit switches; 5) linear arm; 6) pruning end-effector
3. Experiment of the Integrated Pruning System
The field tests were conducted on trellised ‘Fuji’/ Bud. 9 apple trees trained to a fruiting wall architecture at Penn State’s Fruit Research and Extension Center, Biglerville, Pennsylvania (Figure 6). About 100 cuts were applied on branches at a wide array of orientation ranges. A set of ten apple trees were selected randomly from the same orchard block. For each tree, about ten branches of different positions and orientations were selected. The coordinates of the cut points and the orientation of branches were estimated manually from the fixed manipulator base and entered through the GUI. Some cuts were applied approximately 10 to 20 mm from the tree trunk to evaluate the end-effector cutter capability to prune the branches close to the trunk. The branch diameter at the cut point and corresponding joint positions were recorded to validate the design parameters of the integrated pruning system.

Figure 6. Experimental setup of the integrated pruning system in the apple orchard
Objective #3: Investigation of Branch Accessibility with a Robotic Pruner
The spatial requirements of a robotic arm could be estimated based on the location of the branch to establish the trajectory of the robotic arm. Canopy characteristics such as branch density and branch dimension affect the path of the robotic arm to reach the object. The study includes the following tasks: 1) Reconstruction of apple tree; 2) Establishing simulation environments in Matlab; 3) Developing and implementation of collision-free path planning algorithms.
1. Reconstruction of Apple Tree
A Three-dimensional (3D) model of the Fuji’ apple tree having tall spindle tree architecture was developed using the point cloud data acquired from the VLP-16 LiDAR scanner (Velodyne LiDAR, San Jose, CA, USA). All secondary branches from the tree were removed before data collection as these were not considered rigid obstacles. The point cloud data were processed using the function velodyneFileReader() in Matlab (MathWorks Inc, MA, USA). The developed tree model consists of a trunk and 14 primary branches, which were reconstructed using the function spline() in Matlab (Figure 7). The diameter of the trunk and branches were added manually to reconstruct the final tree structure.
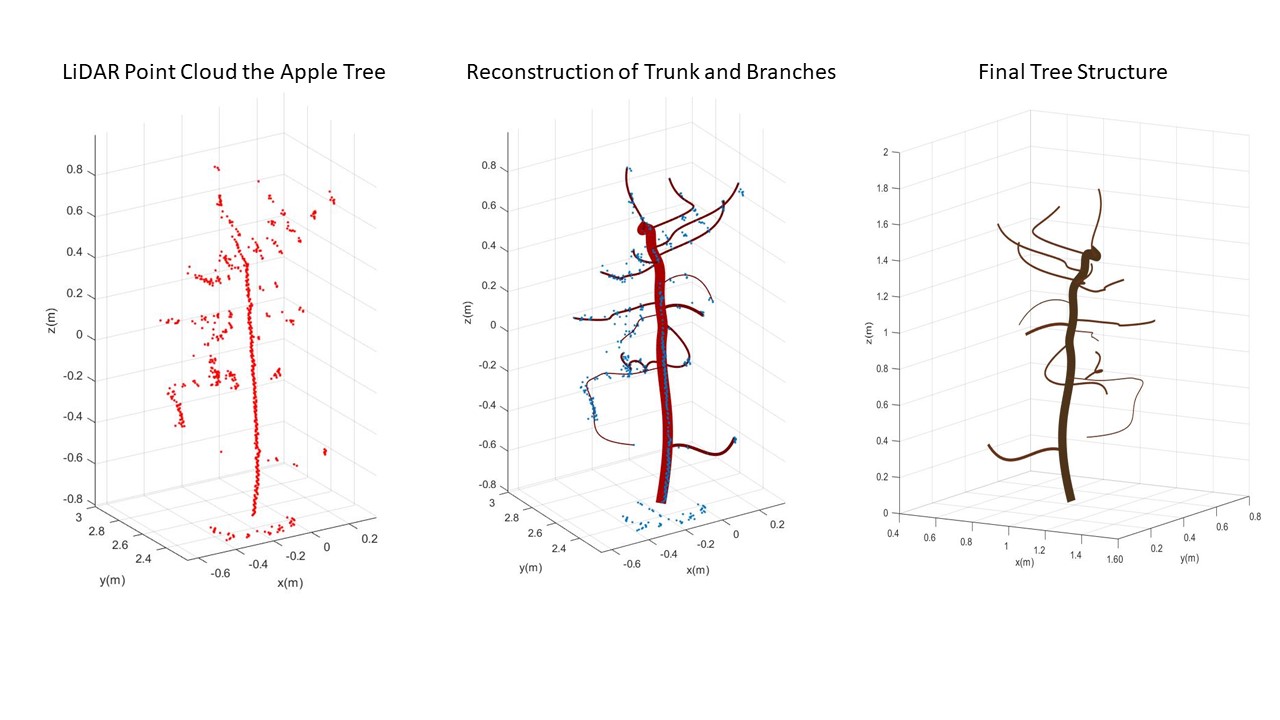
Figure 7. Reconstruction of the apple tree using LiDAR point cloud data
2. Establishing Simulation Environments
A 6R DoF robotic manipulator system: The robotic manipulator used was a 6R DoF industrial robotic arm (UR-5, Universal Robots, Odense, Denmark). The tree model and kinematic model of the manipulator were imported in Matlab to develop the simulation environment. The base of the manipulator was set as origin i.e., x= 0 mm, y=0 mm, and z= 0 mm. Based on the allowable workspace of the manipulator and the physical parameters of the tree model, the distance between the manipulator base and the tree trunk was set at 400 mm (Figure 8(a)).
A 3R3P DoF robotic manipulator system: The kinematic model of the 3R3P DoF manipulator was developed by calculating the DH parameters of the robot. A simulation environment was established in Matlab, comprised of an apple tree model and kinematic model of the robot. The manipulator was set as origin at x= 0 mm, y=0 mm, and z= 0 mm, and the apple tree model was added to the simulation environment with trunk positioned at x = 1000 mm, and y = 250 mm (Figure 8(b)).
For both simulation environments, the task space cubic polynomial trajectory solution was established based on the inverse solution involving minimum joint displacement to move the manipulator from the start to the desired position.
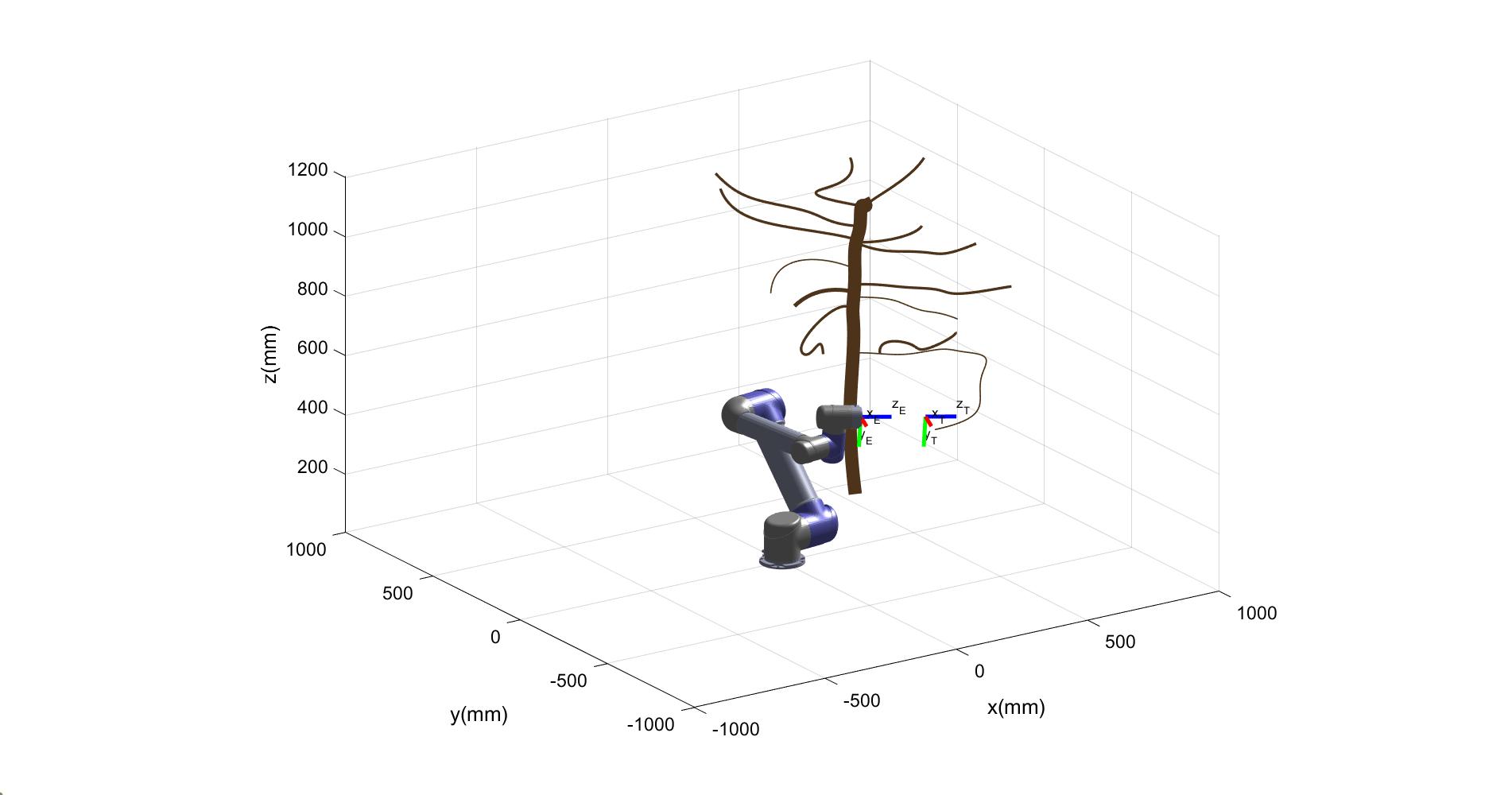
Figure 8. (a) Cutter approach posture at the target branch
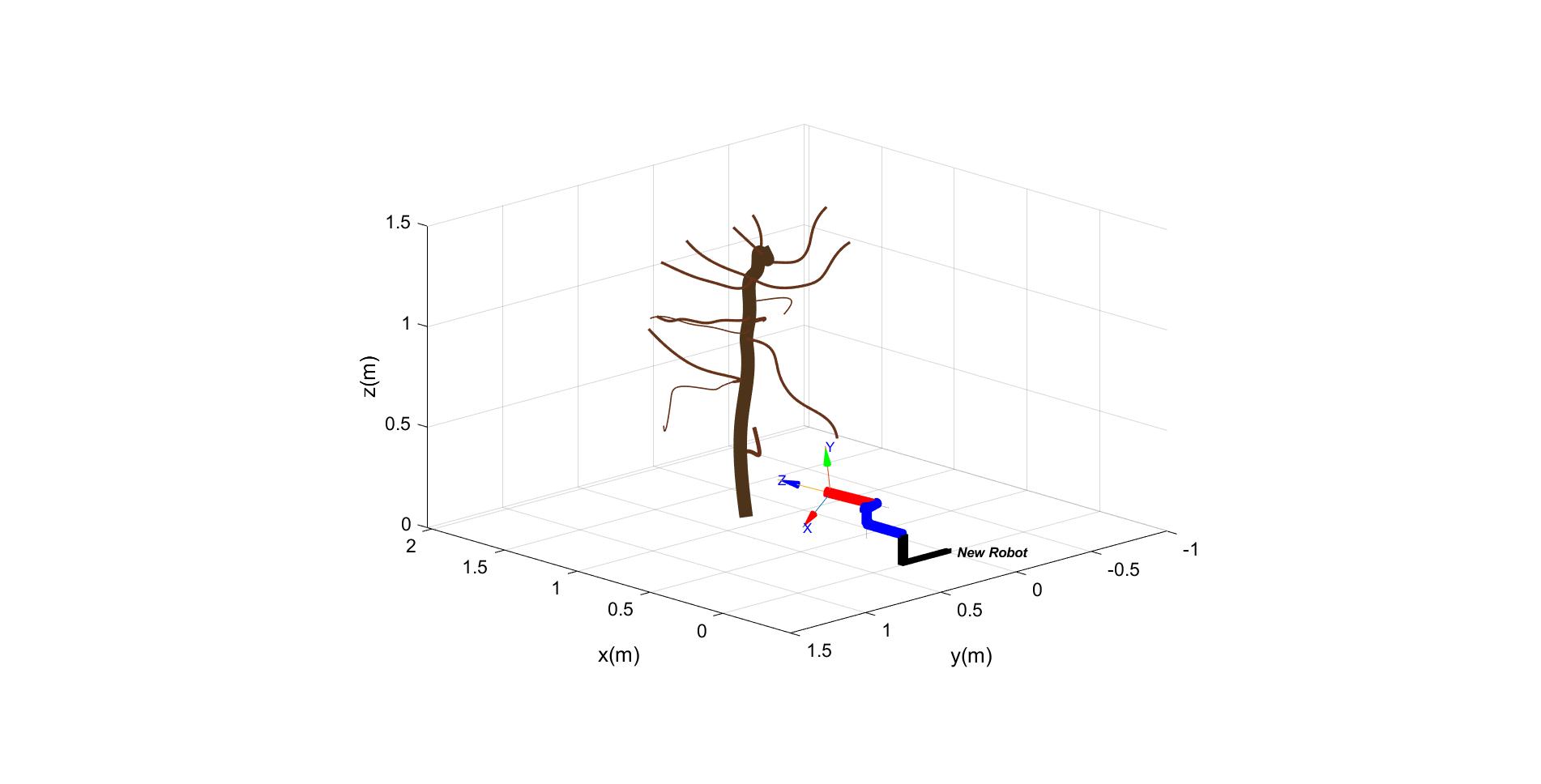
Figure 8. (a) Cutter approach posture at the target branch
3. Developing and Implementation of Collision-free Path Planning Algorithms:
Path Planning Algorithms: An obstacle avoidance algorithm using Rapidly-exploring Random Tree (RRT) was developed for a collision-free path to reach the target pruning points. The RRT algorithm performs two checks: manipulator body collision and end-effector path collision. Target branch coordinates were added and if the algorithm found no collision, the specific path nodes are added to the final solution, and the process continues until connected nodes reach the target location. Furthermore, RRT path smoothing and optimization algorithms were also used to reduce path length and calculate the optimized path. The RRT path smoothing aims to reduce the path length by removing unnecessary path nodes. For path optimization, a non-linear optimization algorithm was implemented with initial and boundary conditions. The minimum avoidance distance from the obstacles was set to 60 mm.
Path Implementation: The simulation setup was created on a laptop computer with Windows 10 operating system (Microsoft Inc., USA) and 16 GB memory. For both robotic systems, the simulation was performed to reach different target pruning points in the apple tree. The coordinates of target pruning points on each branch were marked 20 mm away from the tree trunk. The simulation was conducted by adding multiple approaching poses of the cutter at the target branch (Figure 9(). For each simulation, three branches were selected as target pruning branches. The data were recorded for path finding success, path length, and computational time for all path planning methods to compare the performance for different algorithms. In addition, a lab validation test for a physical 6R DoF robotic arm was also conducted. Serial communication was established between the simulation and the robot controller.
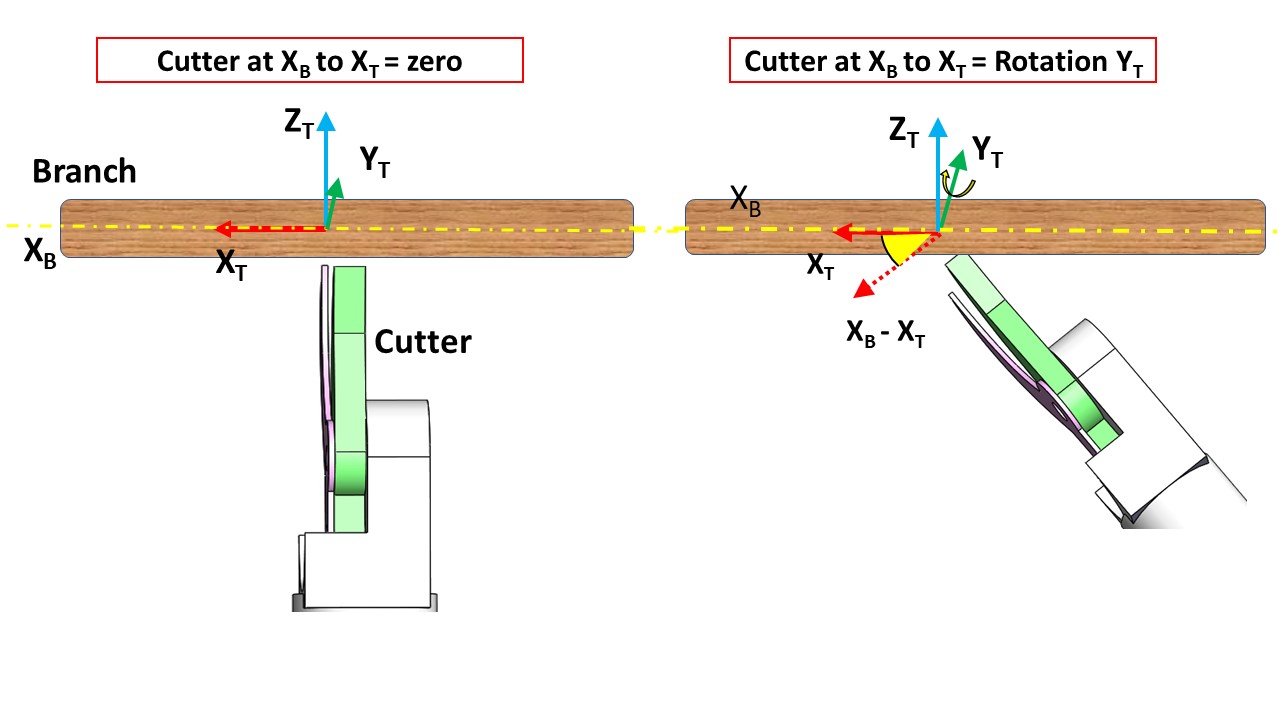
Figure 9. Cutter approach posture at the target branch
Objective #1: Development of an End-effector for Robotic Pruning
1. Dynamic Analysis for Branch Pruning
The results indicated that the Gala trees have the highest torque requirement whereas the lowest torque requirement was observed for Honeycrisp apple trees (Figure 10). For cutting branches of Fuji trees, the required cutting torque for branches placed at the cutter center was higher compared to the cutter pivot. The cutting torque requirement for a 30-degree angle (bevel) cut was higher compared to a zero-degree (straight) cut for Fuji apple trees.
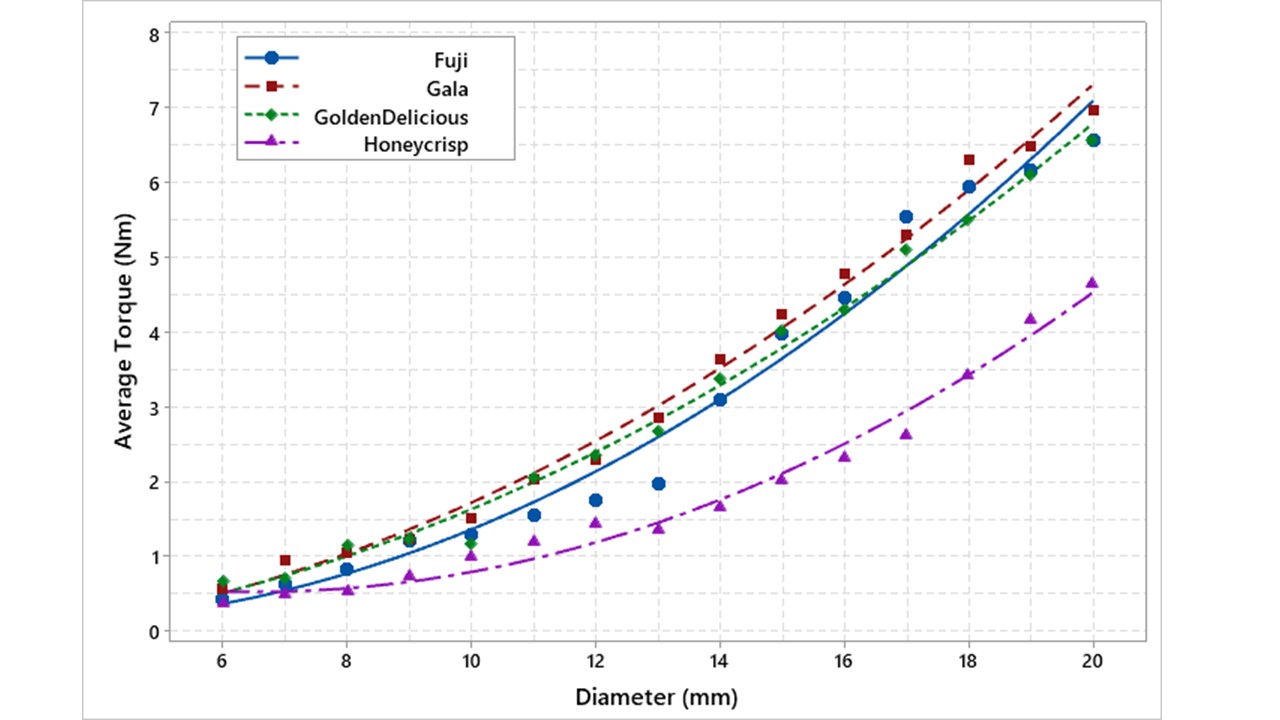
Figure 10. Cutting torque required for pruning different apple cultivars
2. Simulation of Robotic End-effector
These cutter orientation lines depict that the end-effector was capable of aligning the cutter to a wide range of possible orientations in a 3D workspace. The apple tree branches have a wide range of possible orientations, leading to little available space for maneuvering of the end-effector. This simulation shows that the proposed end-effector can be aligned to all possible orientations while utilizing a small workspace for maneuvering within the canopy (Figure 11).
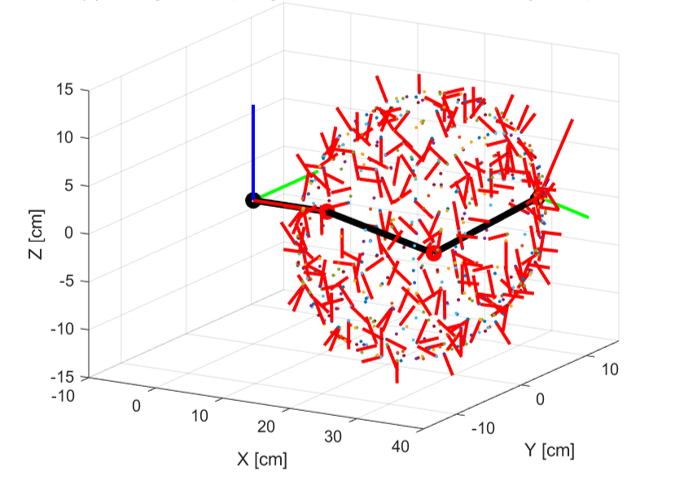
Figure 10. Simulation results of the end-effector workspace and cutter orientation during pruning
3. Field Tests of the End-effector
The rotation capability of the end-effector along two perpendicular directions (Motor 1 and Motor 2) gave the ability to cut the branches at a wide range of orientation in a given 3D space. For any given target and branch orientation, the designed end-effector was successful in producing smooth and split-free cut branches up to 8 mm and 12 mm diameter for test one and test two respectively. The performance of the end-effector was found to be unsatisfactory to cut branches with a diameter greater than ~12 mm as it required two or three strokes of the pneumatic cylinder. The torque produced by the cutter was insufficient to produce large enough force to cut these primary branches.
A more powerful cutter is required to cut the large diameter branches i.e. 12 mm and above. For that purpose, the system may need to be equipped with a large pneumatic cylinder or a modified electric pruner considering the space utilization. The replacement of a pneumatic system with an electrical pruner will expect to improve the cutter efficiency. It was also observed that while cutting, placement of branches closer to the cutter pivot makes it easier to cut compared to when branches are placed close to the tip of the pruner blade. This was an important observation for developing an automatic trajectory and target positioning system.
Objective #2: Development of An Integrated Manipulator System
1. Simulation for Kinematic Dexterity Analysis
Computer software Matlab was used to perform a series of simulation studies. From the simulation of robot workspace analysis, it was observed that the designed robotic system has a spherical workspace. The green, blue, and red lines show the 3D frame of the cutter (Figure 12). The simulation suggests that the end-effector could attain a wide orientation of the cutter tool, and can reach and cut almost every branch available within the workspace of the robot.
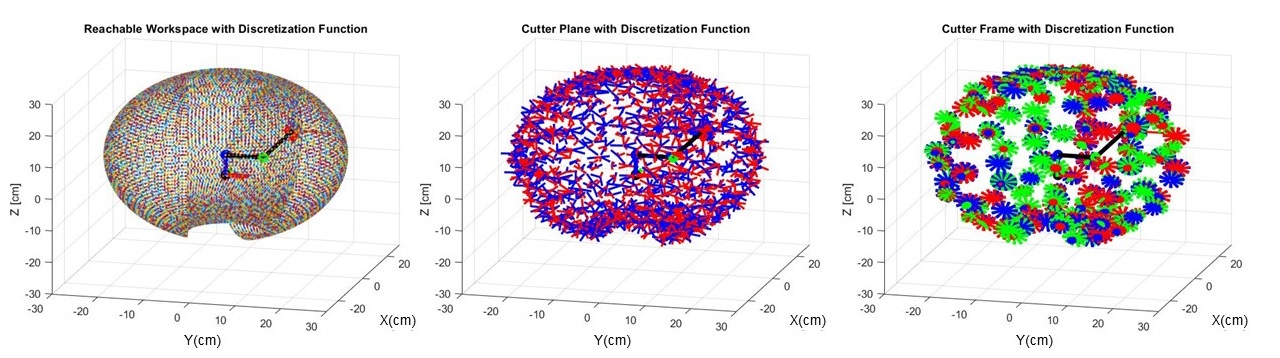
Figure 11. Reachable workspace for the integrated end-effector with (a) Reachable points, (b) Cutter face planes, (c) Cutter tool frames
The manipulability index was determined to be independent of the rotation of the first and last joint of the end-effector (Figure 13). The undesirable joint configurations exist in all robotic manipulators, which occurs when two axes of rotation (two joints) become parallel to each other, resultantly the robot cannot differentiate between those two joints. In the case of the developed robots, these simulations suggest that the developed system has only two undesirable configurations, which is the least possible scenario for robots. Also, the places or region where these configurations could occur in our robot was vertical pointing up or down, and this is very unlikely to cut the branches by pointing the cutter up or down. The unexpected behavior of the robot could also be avoided using an electronic control system. For field tests, a microcontroller-operated electronic control system was developed to control the movement of the cutter to accurately reach the target point.

Figure 12. Manipulability index of the integrated end-effector. (a) Each joint variable, (b) Combined variation in joint variables
2. Field Tests of the Integrated Manipulator
An Arduino-based control system was also developed by utilizing a Matlab graphical user interface (GUI). A series of field tests were conducted on ‘Fuji’/ Bud. 9 apple trees with trellis-trained architecture. The coordinates of the pruning points were entered into the controller of the robot, and the robot moves to reach the target point. The field tests validated the simulation results for manipulability and dexterity. The developed cutter was able to reach the branches of wide orientation and cut up to 25 mm diameter branches. With this cutting capability, the developed system is suitable for pruning any modern apple tree architecture.
During the test, it was observed that when the target point was close to the trunk and only the perpendicular cutting posture was considered, the cutter could collide with the trunk. And when the cutter plane and branch axis were not perpendicular, the effective cutter opening for the branches to enter was greatly reduced, which increased the chance of missing the target branch. This is a very important observation for automatic trajectory planning. Multiple poses of the cutter at the target branch could be selected if the ideal approach is not feasible due to the complex workspace of the apple tree canopy.
Objective #3: Investigation of Branch Accessibility with a Robotic Pruner
A 6R DoF robotic manipulator system: The RRT algorithm was successful in finding a collision-free path i.e., red line path, for defined pruning points within the tree environment (Figure 14). The RRT path may include some retention nodes which increases the path length. The smoothing method successfully removed the redundant nodes in the original RRT path i.e., green line path for all target branches. The RRT smoothing and optimization was successful in reducing the time for trajectory generation and also streamlined the joint angles, velocities, and accelerations. The variation coefficient of path length for the optimization method was low compared to RRT with smoothing, which confirms the stability and repeatability of the method. A lab validation test was performed for a 6R DoF industrial robotic arm to validate the feasibility of the path planning algorithms. The hardware was successfully interfaced with the simulation environment, and the robot followed the simulated paths to reach the pruning cut points on the selected branches.
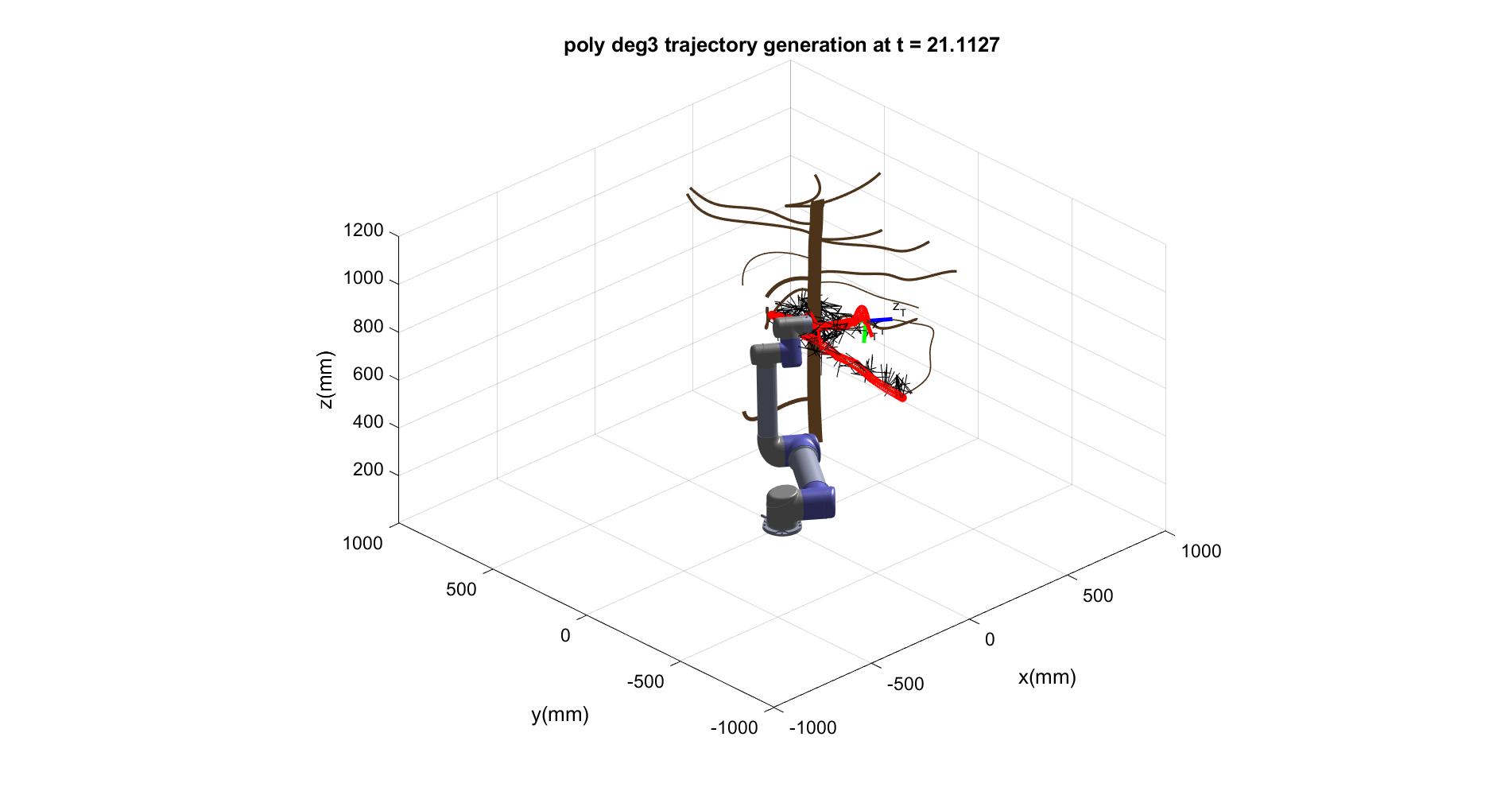
Figure 14 Path planning using a 6R DoF robotic manipulator
A 3R3P DoF robotic manipulator system: The collision-free path for all selected branches of the 3D reconstructed apple tree was created successfully using the 3R3P DoF robot (Figure 15). The path smoothing strategy used in the study reduces 40% of path length (green line) the compared to original RRT (red line) path length. The results showed that the end-effector cutter was successfully aligned perpendicular to branch orientation before making the cut. But for a complex apple tree, if the robot failed to find the path at a certain approaching pose, the computational time is expected to be higher as more iterations will be required to generate the path. Furthermore, some unreachable branches from one side of the tree were possible to reach from the other side of the tree.
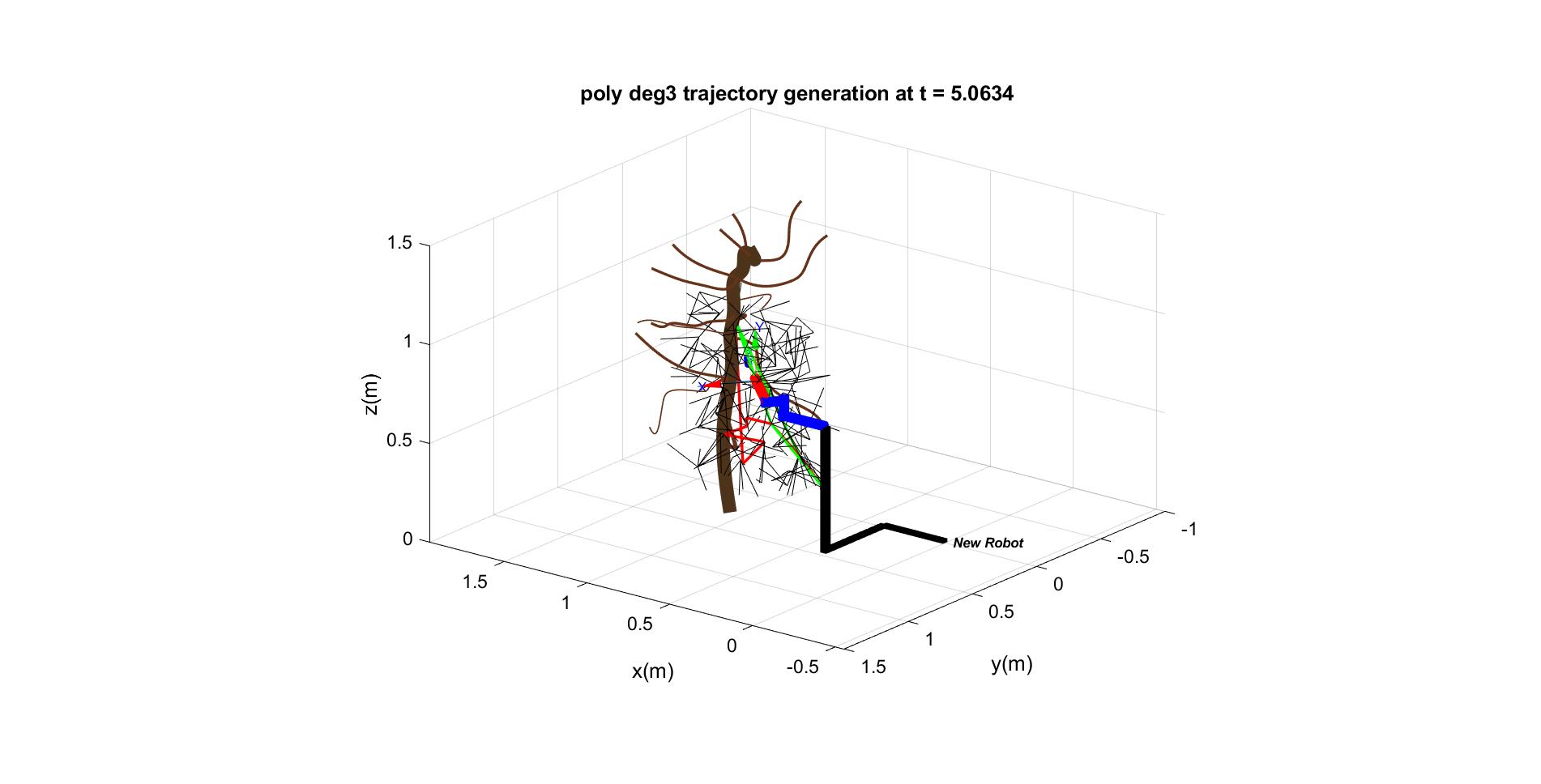
Figure 15. Path planning simulation of two robots for pruning the apple tree
This study was focused on the implementation of collision-free path planning algorithms in a real-world apple tree environment. The mean computational time for the 6R DoF and 3R3P DoF manipulator was 19 s and 14 s per branch, respectively. The algorithm works well for the adopted apple tree model, but for a more complex real-world tree that includes multiple secondary branches at wide orientation ranges, the algorithm may need some adjustment based on the physical parameters of the apple tree canopy as well as other parameters including wind speed and terrain conditions.
The following conclusions were drawn from this project:
- Pruning dynamic analysis indicated that the cutting torque required to prune branches of different apple cultivars including Gala, Fuji, Golden Delicious, and Honeycrisp varies significantly because of differences in specific gravities. The cutting torque required for Honeycrisp apple trees was significantly lower compared to Gala, Fuji, and Golden Delicious apple trees. To develop an end-effector with sufficient cutting capabilities, the component selection for the cutting mechanism should consider the cutting torque requirements of the target cultivar for efficient robotic pruning operation.
- A 2R DoF pneumatic end-effector was developed for pruning Fuji apple trees. The workspace analysis showed that the end-effector has a spherical workspace with a diameter of 26 cm. Due to its compact size, the end-effector was able to maneuver freely within the tree canopy to align itself to any given orientation. The wide range of alignments and the compact size of the end-effector permit its application for robotic pruning in complex apple tree architectures. The cutting capability could be improved with increased pneumatic cylinder size and pressure.
- A 3R DoF shear cutter end-effector integrated with a cartesian manipulator was developed. The 3R end-effector was integrated with a 3P DoF cartesian manipulator system as the cartesian system exhibits low pose change attributes for maneuvering, thus reducing the collision potential. The end-effector was able to position the Fuji apple branches in the cutter opening perpendicular to the cutter plane before cutting. Once the branches were properly aligned in the cutter opening, the pruning effector was able to cut the branches up to 25 mm in diameter. With this capability, the designed system can be used for robotic pruning in modern high-density apple orchards.
- The algorithms were developed for collision-free and optimized path planning of a 6R DoF and a 3R3P DoF robotic manipulator. For the implementation of path planning algorithms in a constrained environment, a 3D model of the apple tree was developed using a LiDAR scanner. The algorithms were successful in finding a collision-free path for defined pruning points within the tree environment. The RRT path may include some retention nodes which increases the path length. The smoothing method successfully reduced the RRT path lengths by removing the redundant nodes from the path. The mean computational time for the 6R DoF and 3R3P DoF manipulator was 19 and 14 s per branch, respectively. The cartesian-based system required less time as it has a dexterous workspace due to prismatic joints. Due to the complex tree canopy, the cutter poses and the approach of the manipulator to reach the target branches are critical in collision-free path finding. The addition of alternate approach poses of robotic manipulator improved the path finding success rate.
Education & outreach activities and participation summary
Participation summary:
Peer-Reviewed Articles
Zahid, A., Mahmud, M., He, L., Choi, D., Heinemann, P., and Schupp, J. 2020. Development of an integrated 3R end-effector with a cartesian manipulator for pruning apple trees. Computers and Electronics in Agriculture, 179, 105837
Zahid, A., He, L., Zeng, L., Choi, D., Schupp, J., and Heinemann, P. 2020. Development of a robotic end-effector for apple tree pruning. Transactions of the ASABE, 63(4): 847-856
Conference Papers
Zahid, A., Mahmud, M., He, L. 2021. Evaluation of Branch Cutting Torque Requirements Intended for Robotic Apple Tree Pruning. In 2021 ASABE Annual International Virtual Meeting, Paper No. 2100262
Zahid, A., He, L., Choi, D., Schupp, J., and Heinemann, P. 2020. Collision-free path planning of a robotic manipulator for pruning apple trees. In 2020 ASABE Annual International Virtual Meeting, Paper No. 2000439
Presentations
Zahid, A., Mahmud, M., He, L. 2021. Evaluation of Branch Cutting Torque Requirements Intended for Robotic Apple Tree Pruning. In 2021 ASABE Annual International Virtual Meeting (Virtual presentation)
Zahid, A., Mahmud, M., He, L. 2021. Path Planning in a Constraint Environment for Robotic Apple Tree Pruning. In 2021 ASABE Annual International Virtual Meeting (Virtual presentation)
Zahid, A., Mahmud, M., He, L., Choi, D., Heinemann, P., and Schupp, J. 2021. Concept design of a robotic pruner for apple trees. Tree Fruit: Ag Engineering Session, 2021 Mid-Atlantic Fruit and Vegetable Convention, Hershey PA. (Virtual presentation: More than 130 participants on zoom).
Zahid, A., Mahmud, M., He, L., Choi, D., Heinemann, P., and Schupp, J. 2021. Design of a 6 DoF robot for pruning apple trees. In 2021 Graduate School Exhibition Pennsylvania State University, University Park PA (Virtual presentation)
Zahid, A., He, L., Choi, D., Schupp, J., and Heinemann, P. 2020. Collision-free path planning of a robotic manipulator for pruning apple trees. In 2020 ASABE Annual International Virtual Meeting (Virtual presentation)
Zahid, A., Mahmud, M., He, L., Choi, D., Heinemann, P., and Schupp, J. 2020. Development of 3R end-effector for a cartesian manipulator for pruning apple trees. In 2020 Northeast Agricultural and Biological Engineering Conference (NABEC) (Virtual presentation)
Posters
Zahid, A., Mahmud, M., He, L., Choi, D., Heinemann, P., and Schupp, J. 2021. Concept design of a robotic pruner for apple trees. In 2021 Mid-Atlantic Fruit and Vegetable Convention (Poster)
Zahid, A., Mahmud, M., He, L., Choi, D., Heinemann, P., and Schupp, J. 2021. Branch Accessibility of A Robotic Pruner For Pruning Apple Trees. In 2020 Mid-Atlantic Fruit and Vegetable Convention (Poster)
Project Outcomes
Despite the success of automation and mechanization for row crops, the production operations of tree fruits are still primarily dependent on human labor. Apple is an important constituent of the U.S. tree fruit industry. For producing fresh market apples, labor is required throughout the year, to perform various operations such as thinning, pruning, and harvesting, etc. These operations are labor-intensive and constitute the major fraction (56%) of the total variable costs. Pruning is an important production operation required to produce good quality apples; however, it accounts for 20% of the total labor costs. As the limited labor availability and higher costs becoming an issue for the growers, they require alternative means for performing this laborious operation. This decreasing labor availability is a threat to the sustainability of the apple industry. This project contributed to agricultural sustainability by focusing on technology development to reduce labor dependence for pruning. The project aimed at developing a robotic manipulation system for pruning apple trees. The project was completed in different phases to develop various software and hardware components of the robotic manipulation system. The key outcomes include a pneumatic end-effector tool for robotic pruning, electric shear pruner end-effector tool integrated with a cartesian robotic manipulator for tree pruning, and collision-free path planning algorithms to reach the target cut point on the selected branches. Overall, the goal and objectives of this project were successfully accomplished. Several components of the developed system can be improved to achieve a fully functional robotic pruning operation. For future work, a camera-based vision system will be developed for accurately measuring the diameter of the branches to automate the decision-making for pruning branch selection. Additionally, the developed path planning algorithms may require fine-tuning and modification for real-time implementation in the orchard/field conditions.
This project helped us to learn much more about existing apple production practices. Despite the hard work of many researchers, there is still very little progress made towards the development of an automated pruning system for apple trees. Based on our research, we found that the robotic pruning system should be developed considering the requirements of the apple tree as the traditional industrial robots may not be able to work in the complex apple tree canopy. We compared our results to existing extension and peer-reviewed literature from around the world, and in this process, we broadened our understanding of the well-researched and established practices and the research and extension that still needs to be done. We also learned more about the challenges facing apple growers in Pennsylvania. In addition, we also learned that tree architecture plays an important role in the successful operation of the robotic pruner. The new cultivars which can develop can be trained to straight branches could be ideal to facilitate the adoption of the automated pruner, but those new cultivars should also have a high yield to compensate for the additional costs of robotic pruning systems.
During this project, we learned that working closely with growers to take their inputs on the requirements, talking to orchardists interested in incorporating automation in their management practices, and synthesizing these experiences with the study of literature and research activities, is an effective way to plan the research project. By doing so, efficient technologies can be developed, which will have a positive impact on the sustainability of the tree fruit industry.
Over the past two years, we have had the opportunity to participate in different conferences, seminars, and grower’s conventions. Working on this project has increased both our knowledge of research activities as well as the importance of good outreach/extension practices. We participated in extension activities to highlight the research objectives/directions towards developing an automated pruner, and also to get the growers’ requirements and expectations of a fully functional robotic pruner. Through this, we developed skills in advocating robotic/automated pruning and we will continue to deliver in this area.
In the future, a vision system will be integrated to create a 3D obstacle model of the real-world apple tree branches. As the developed path planning algorithms were relatively slow in pathfinding, thus a modified RRT with optimization algorithms will be developed, to stabilize the path generation and improve the obstacle avoidance efficiency. Additionally, an algorithm will be implemented to optimize the pruning cut sequence for robotic pruning, aimed at reducing the overall time and path lengths. These future studies will lay the foundation for the development of a robotic pruning system for the economical and sustainable apple production system.
Information Products
- Development of an integrated 3R end-effector with a cartesian manipulator for pruning apple trees
- Development of a Robotic End-Effector For Apple Tree Pruning
- Collision free Path Planning of a Robotic Manipulator for Pruning Apple Trees
- Development of a 3R DoF End-effector for Pruning Apple Trees
- Collision free Path Planning of a Robotic Manipulator for Pruning Apple Trees
- Branch Accessibility of A Robotic Pruner For Pruning Apple Trees
- Evaluation of Branch Cutting Torque Requirements Intended for Robotic Apple Tree Pruning